
Gouqing Zhou, Gangchao Lin, Xiang Zhou, Yizhi Tan, Weihao Li, Xianxing Li, Ronghua Deng. Controlling Scanning Trajectory of Two-dimensional Galvanometer Based on Bresenham Algorithm[J]. Laser & Optoelectronics Progress, 2021, 58(23): 2312001
- Laser & Optoelectronics Progress
- Vol. 58, Issue 23, 2312001 (2021)
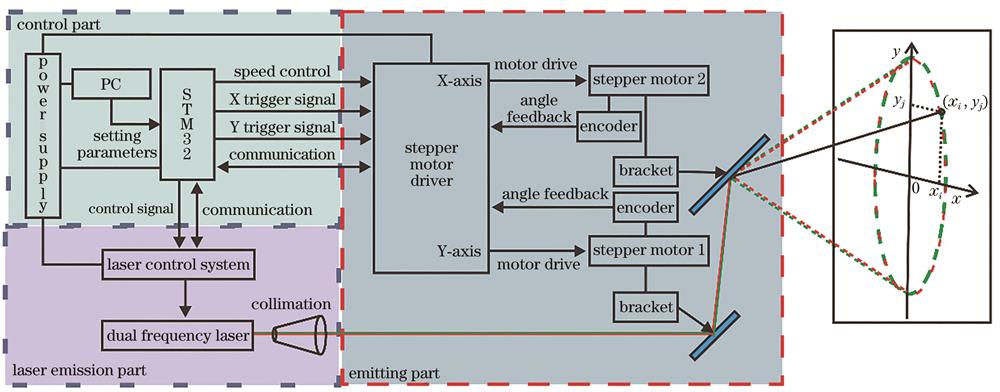
Fig. 1. General block diagram of two-dimensional galvanometer scanning system
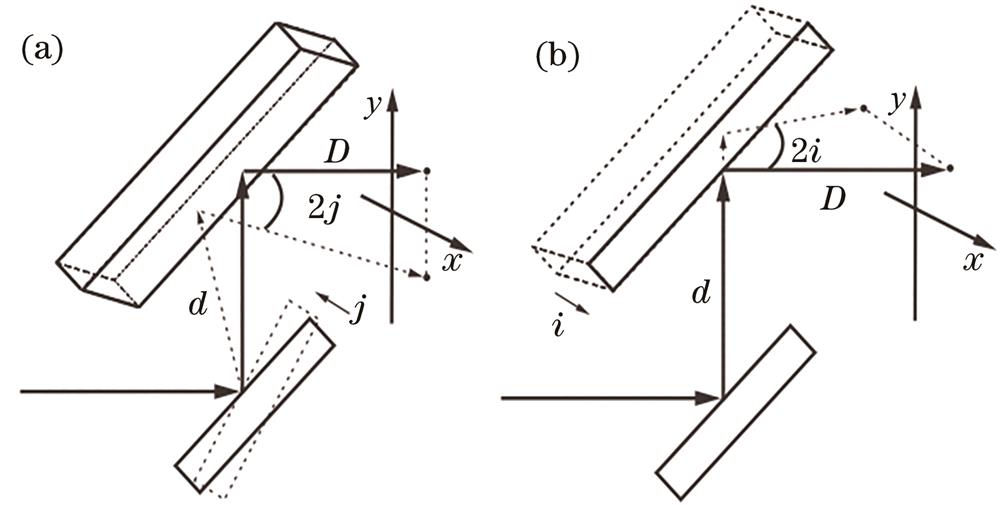
Fig. 2. Scanning diagram. (a) y-axis swing; (b) x-axis swing
Fig. 3. Comparison of algorithm output values before and after improvement. (a) x coordinate values comparison; (b) y coordinate values comparison; (c)
Fig. 4. Control experiment
Fig. 5. Two-dimensional galvanometer scanning experiment. (a) Two-dimensional galvanometer scanning; (b) 20° cone scanning trajectory
Fig. 6. Scanning trajectory's simulation. (a) 10° scanning trajectory; (b) 20° scanning trajectory; (c) 20° scanning trajectory; (d) 60° scanning trajectory
Fig. 7. 20° conical scanning trajectory and optical system transverse angle error after compensation. (a) Scanning trajectory of 20° cone after compensation; (b) comparison of lateral angle errors before and after compensation
|
Table 1. Values of simulate variable scanning trajectory

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20