
Fanghua Liu, Yan He, Yuan Luo, Wenwu Jia, Lijun Cao, Linlin Li, Kaipeng Li, Yongqiang Chen, Shouchuan Guo, Weibiao Chen. Moving Target Distance and Velocity Measurement System Based on Photo-Counting Lidar[J]. Chinese Journal of Lasers, 2021, 48(13): 1310001
- Chinese Journal of Lasers
- Vol. 48, Issue 13, 1310001 (2021)
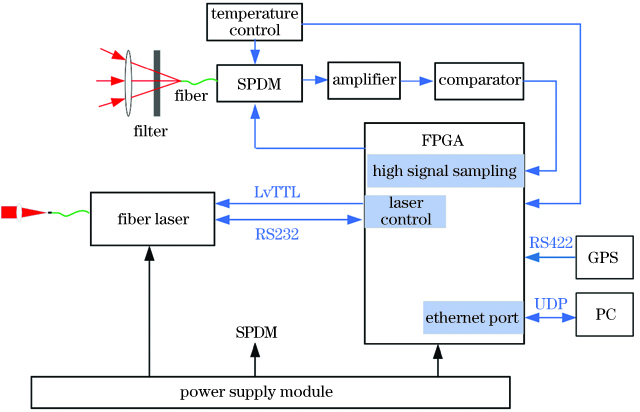
Fig. 1. Structure of high speed ranging system

Fig. 2. Overall view of laser ranging lidar
Fig. 3. Relationship between signal to noise ratio and detection distance
Fig. 4. Relationship between ranging accuracy and detection distance
Fig. 5. Time-dependent single-photon counting curve and its local magnification
Fig. 6. Experimental results of laser ranging
Fig. 7. Test selected five target locations
Fig. 8. Results of mobile UAV ranging experiment. (a) Original result; (b) Gaussian fitting result; (c) polynomial fitting processing result; (d) velocity
Fig. 9. UAVs ranging experiment UKF algorithm processing results. (a) Ranging values between UKF algorithm and polynomial fitting; (b) ranging deviation between UKF algorithm and polynomial fitting method; (c) velocity measurement values between UKF algorithm and polynomial fitting; (d) velocity measurement deviation between UKF algorithm and polynomial fitting method
|
Table 1. Main technical parameters of system
|
Table 2. Ranging results of target plate at different positions


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20