Objective With the development of unmanned aerial vehicle(UAV) technology, the identification and ranging of small targets at long ranges have become an essential defense requirement. The Swedish defense research agency investigates a linear detected laser range lidar for target recognition and classification, such as small boats at sea and small UAV. However, to measure a small target at long range, the linear detected lidar requires a high-power laser so that the system will be very huge and harmful to the eyes. Alternatively, the time-correlated single photo-counting(TCSPC) technique has emerged as a candidate technology for lidar systems due to its high-sensitivity and excellent range resolution. The use of high-sensitivity single-photon detectors means that low average optical power levels and receive aperture can be used, even at long distances. In this study, we propose a photo-counting lidar, which can install on the theodolite platform to real-time obtain the distance and speed of a small moving target at long-rang.
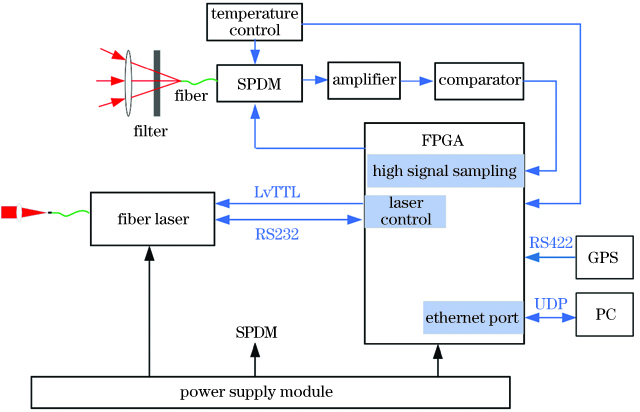
Methods The light source of lidar is a fiber laser at 1545.3 nm, and the pulse width is 6 ns. The laser single pulse energy is 80 μJ, and the repetition frequency is 25 kHz. To track the small moving target more easily and steadily, the divergence angle of the laser beam and receiver field of view is set to 1.0 and 1.2 mrad, respectively. The InGaAs/InP avalanche photodiodes, which is Peltier cooled to 240 K, is adopted as the single-photon detector. The detection efficiency is 15% at 1545 nm, and the dark count rate is 30 kHz. A 1 nm bandpass fitter is selected to reduce the solar background noise. The lidar export a distance of the target by accumulating every 250-laser echo signal collected using the field-programmable gate array(FPGA) with a sampling rate of 400 MHz. Thus, the distance update rate is 100 Hz. However, the laser pulse width is wider than the echo signal-sampling resolution. Therefore, a Gaussian-fitting method is used to deal with the accumulated echo signal so that it can find the exact target distance. During the outfield test, a 0.99 reflectivity square target plate with a side length of 25 cm is designed so that it can be equivalent to a small target with a reflection cross-sectional area of 0.1 m 2 and reflectivity of 0.6. The target plate is placed in five places with a known distance. The accuracy and precision of lidar are tested using lidar to range the five targets. Afterward, the target plate is placed 5 km away to test the lidar maximum range. Finally, the non-cooperative moving target ranging ability of the lidar is verified, the lidar system is installed on the theodolite platform for tracking and ranging a moving UAV fabricated by DJI corporation. The unscented Kalman filter algorithm is used to obtain the distance and velocity of UAV in real-time.
Results and Discussions During the entire outside experiment, the atmospheric visibility is 7 km. The target plate is detected at a distance of 5017.56 m(Fig.5) with the detected single-to-noise(SNR) of 5.86 dB. The precision is 0.165 m. The laser power is 1.42 W with a maximum power of 2 W. The maximum range is 5446.3 m through the extinction method. The lidar accuracy is 0.161 m when the detected SNR is around 6 dB(Table 2). Besides, the lidar system has tracked the moving UAV with a starting distance of 972.53 m(Fig. 8(a)). The laser power is 0.625 W, and the detected SNR is 20.2 dB during the tracing experiment. The Gaussian-fitting result showes that the distance is jittered so that it cannot calculate the velocity in real-time(Fig.8(b)). Thus, the polynomial fitting approach is used to smooth the distance obtained from a Gaussian-fitting method so that the speed of UAV can be precisely calculated by differentiating the polynomial fitting result(Figs. 8(c) and(d)). The distance and speed of the UAV are obtained using the unscented Kalman filter algorithm in real-time(Fig.9(a) and(c)). The unscented Kalman filter algorithm result, compared to the polynomial fitting approach, showes that the ranging deviation is within 0.11 m(Fig.9(b)), and the speed deviation is within 0.5 m/s(Fig.9(d)).
Conclusions A miniature lidar is designed, which is suitable for high-speed ranging of long-distance non-cooperative small targets. The theoretical analysis and experimental results show that the laser ranging system can achieve a maximum-detecting distance of 5446.3 m and an accuracy of 0.161 m for a small target with a reflection cross-sectional area of 0.1 m 2 and reflectivity of 0.6 when the atmospheric visibility is 7 km. The system is installed on the theodolite platform to track and range the moving UAV. The distance and velocity of the UAV are obtained using the unscented Kalman filter algorithm in real-time. The ranging and speed deviations are within 0.11 m and 0.5 m/s, respectively. The photo-counting lidar design and unscented Kalman filter algorithm proved to be feasible for small moving targets ranging.