Objective When the binocular vision system is used to measure underwater targets, the refraction effect of water makes the measurements differ from the actual situation. The existing methods for reducing the refraction effect include the following. 1) A high-accuracy refraction model is established for calculating the refraction path of each pixel in the camera using the model and for obtaining the actual position of the pixel. 2) The refraction effect is assumed to be an aberration of the camera model. Furthermore, a new camera-calibration method is used to estimate the camera parameters in the underwater environment through which a new measurement model is established to reduce the refraction effect. 3) By improving the traditional epipolar line-based matching method, the traditional onshore epipolar line model can be applied to underwater situations for feature point matching. However, these three methods have certain limitations. 1) High-order parameters need to be introduced when establishing a high-accuracy refraction model, making the calculation process more complex. 2) Special calibration devices are used for camera calibration to compensate for the refraction effect of water. Although an accurate underwater refraction model can be obtained using this method, the calibration devices are usually complex. 3) Although the matching method of the traditional epipolar line exhibits good practicability, the refraction effect on the epipolar line is not considered. Herein, we propose a new modeling method of underwater epipolar line using a device containing multiple line-structured light and a binocular vision system. The discrete curve model of the underwater epipolar line is established based on the ray-tracing principle. In addition, the underwater epipolar line-matching method is improved for feature point matching. The method can effectively improve the matching accuracy of underwater feature points and further improve the measurement accuracy of underwater targets.
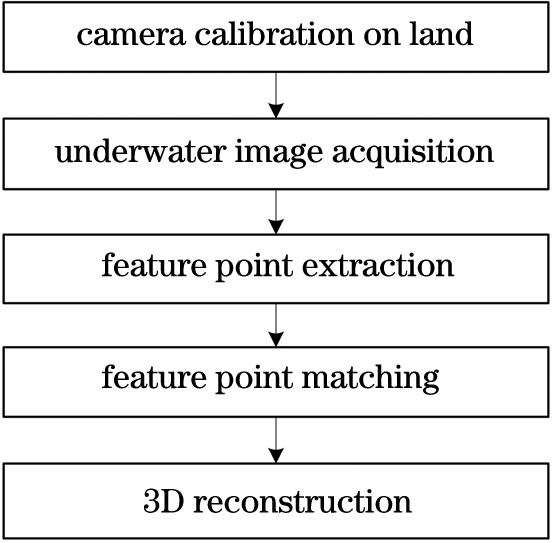
Methods Herein, the objects of measurement included a standard ball workpiece (Fig. 9), a standard cylinder workpiece (Fig. 9), and a three-ball workpiece (Fig. 13). Our multiple line-structured light and binocular vision system comprised two Aca1300-60gm gray-scale cameras produced by the German Basler Company, 25 blue line lasers, a blue dot laser, several lighting LEDs, and a switch (Fig.2). The abovementioned devices are strictly fixed in a sealed cabin. The included angle of principal axes and the spatial distance of optical centers between the two cameras are approximately 35° and 500 mm. The laser position is fixed, and all the light planes are approximately parallel to each other. The measured object is placed within the cameras’ public field of view, and the array line laser beams are projected on the object surface. The images are captured simultaneously by the binocular vision system. The feature points of the current target objects are obtained from these images (Fig.11). According to the above system’s underwater binocular stereo vision model and ray-tracing principle, we adopted an iterative optimization method to solve the underwater epipolar line model, which corresponded to a pixel on the left image plane. Then, we could achieve a higher precision underwater feature point selection and matching according to the epipolar line model. In the experiment, the standard ball and standard cylinder workpieces are, respectively, placed in still water for measurement. The feature points of the extracted object are the waiting-for-matched points. The waiting-for-matched points are screened and matched based on the minimum distance constraint and the epipolar line model. To evaluate the matching effect, we compared the matching precision of the model with that of the traditional epipolar line model in the experiments. Furthermore, we conducted a three-dimensional (3D) reconstruction of the matched feature points to verify the effect of using the epipolar line model for underwater target object measurement.
Results and Discussions Our multiple line-structured light exhibit good penetration capability and can capture the characteristic information of underwater targets more accurately. The experimental results showed that the established underwater discrete epipolar line model is more consistent with the actual distribution of feature points than the traditional epipolar line model. The distance between the feature points and the epipolar line model is closer, and the matching accuracy is higher (Table 1). In the measurement experiments on the three-ball workpiece, the maximum measurement radius errors obtained using the traditional epipolar line model are greater than 0.5 mm, whereas those obtained using the epipolar line model are less than 0.3 mm (Table 3). In the experiments of measuring the center distance of several standard ball workpieces, the maximum center distance error obtained using the traditional epipolar line model is greater than 0.6 mm, while that of the epipolar line model less than 0.2 mm. Thus, the epipolar line model can achieve higher spatial accuracy when it is applied to 3D underwater target measurement.
Conclusions Herein, we proposed a discrete epipolar curve model-based underwater multiple line-structured light binocular measuring method. According to the underwater refraction model of the measurement system, we established the underwater discrete epipolar curve model. Then, we selected the waiting-for-matched feature points using the epipolar line model to achieve effective feature matching. The experimental results showed that the method has high measurement accuracy for the standard underwater ball and cylinder workpieces. It solves the problem of large matching error of feature points in the underwater binocular system and exhibits a good 3D reconstruction effect. Moreover, it is suitable for underwater target measurement because of the simple operation of the measurement process.