
Lu Xu, Xiaxia Liu, Xu Yang, Yijia Zhang, Long Wu. Study of wide-pulse photon counting polarization lidar to detect shallow water layer (Invited)[J]. Infrared and Laser Engineering, 2021, 50(3): 20200452
- Infrared and Laser Engineering
- Vol. 50, Issue 3, 20200452 (2021)
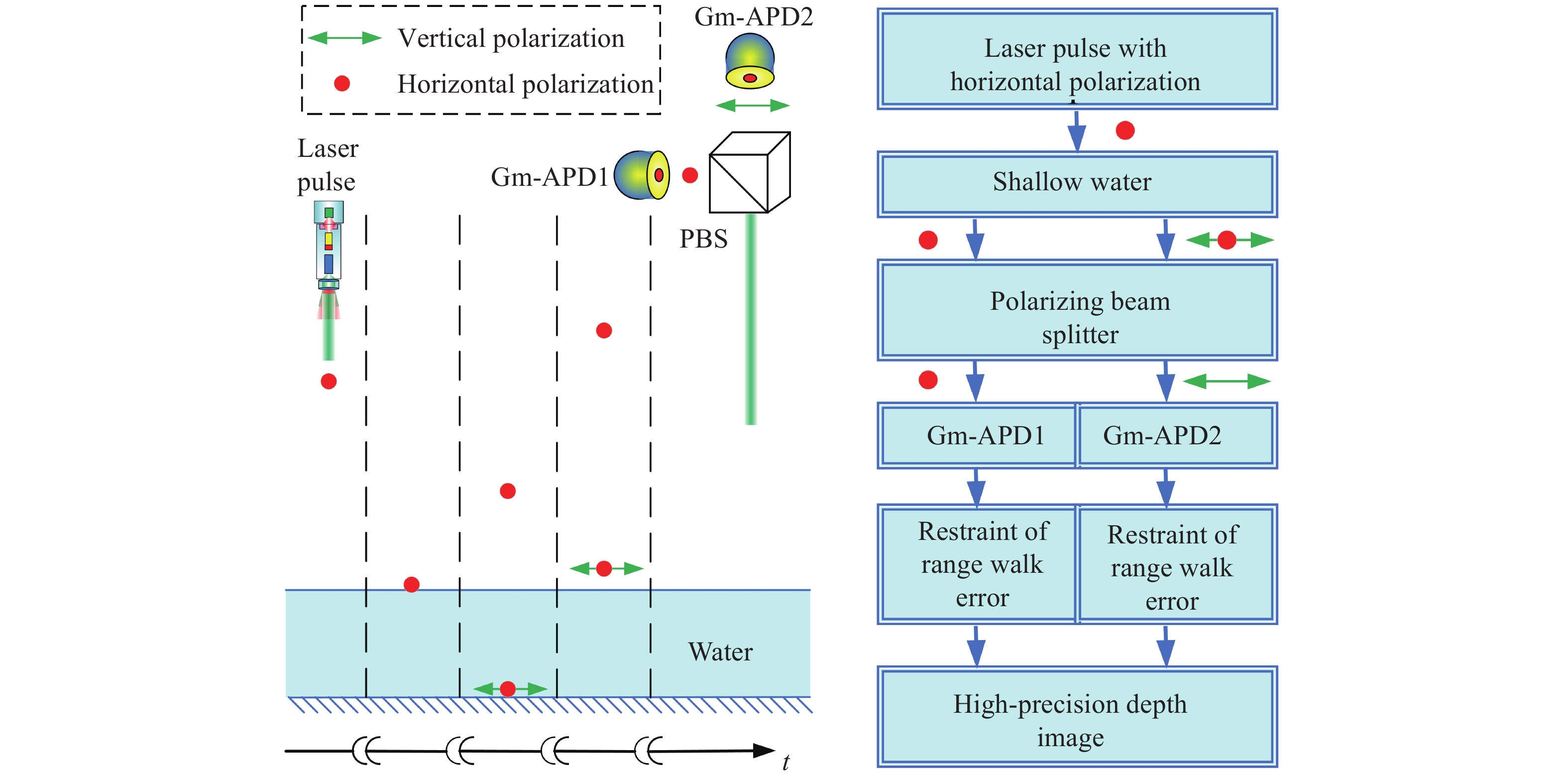
Fig. 1. (a) Schematic diagram for realizing polarization splitting; (b) Flow chart of program
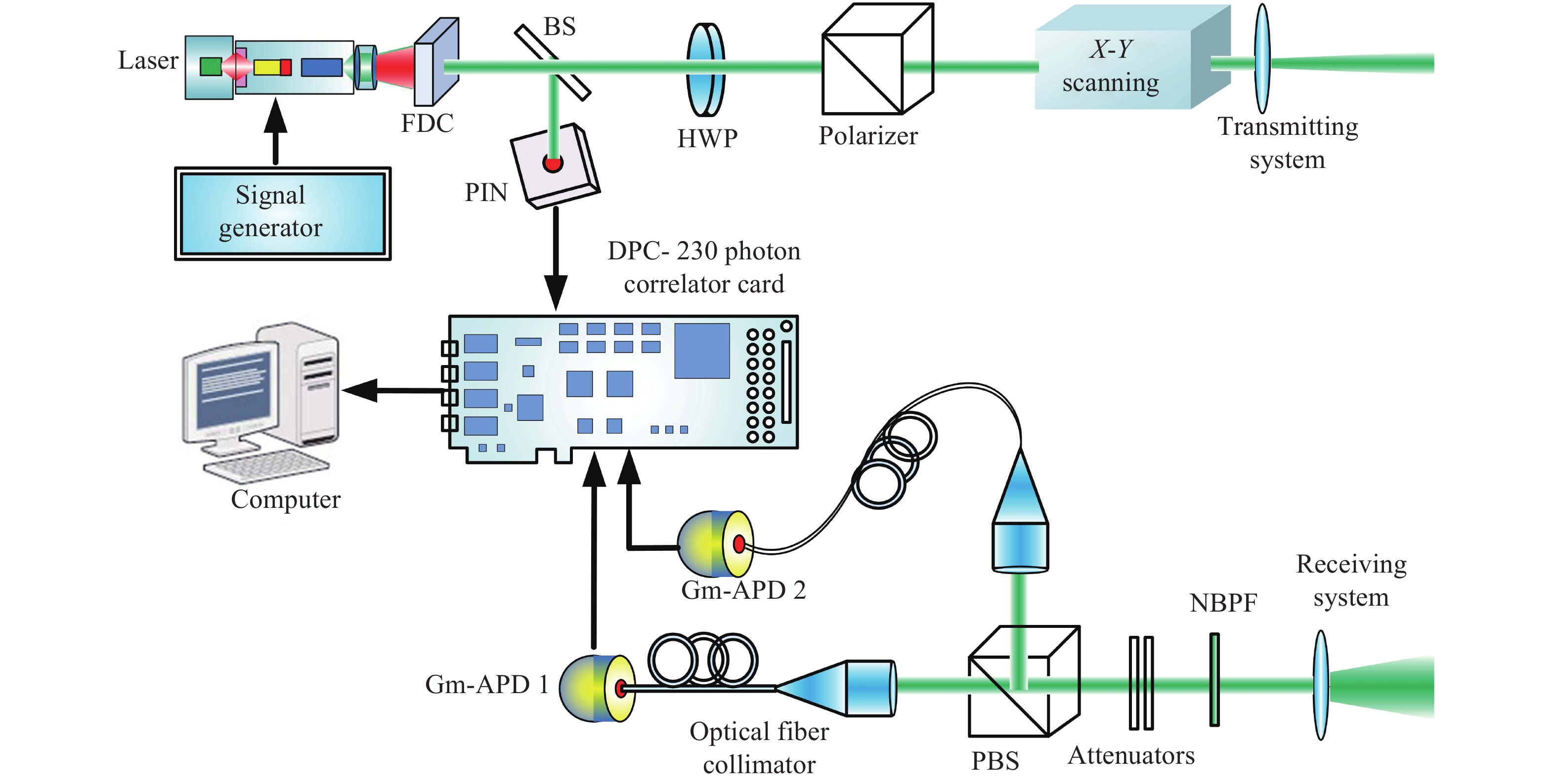
Fig. 2. Schematic diagram of the double Gm-APDs polarization lidar system(FDC, Frequency doubling crystal; PIN, High-speed PIN detector; BS, Beam splitter; HWP, Half wave plate; Polarizer, Glan-Taylor prism; PBS, Polarization beam splitting prism; NBPF, Narrow band pass filter; Gm-APD, Gm-APD detecting module)
Fig. 3. (a) Double Gm-APD polarization lidar system in the laboratory; (b) Shallow water layer designed in the laboratory
Fig. 4. Photon counting distributions of the two Gm-APDs with different line polarized light on a pixel. (a) Horizontal line polarized light; (b) Vertical line polarized light
Fig. 5. Depth image of the shallow water layer obtained in the experiment. (a) Before the restraint of range walk error; (b) Depth image under another view of (a); (c) After the restraint of range walk error; (d) Depth image under another view of (c)
Fig. 6. Histogram of range error distribution of experimental data points. (a) Pixels of the shallow water surface in Fig.5(a) ; (b) Pixels of the bottom surface in Fig.5(a) ; (c) Pixels of the shallow water surface in Fig.5(c) ; (d) Pixels of the bottom surface in Fig.5(c)
|
Table 1. [in Chinese]

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20