
Yunhao Fu, Baisong Chen, Wenqiang Yue, Min Tao, Haoyang Zhao, Yingzhi Li, Xuetong Li, Huan Qu, Xueyan Li, Xiaolong Hu, Junfeng Song, "Target-adaptive optical phased array lidar," Photonics Res. 12, 904 (2024)
- Photonics Research
- Vol. 12, Issue 5, 904 (2024)
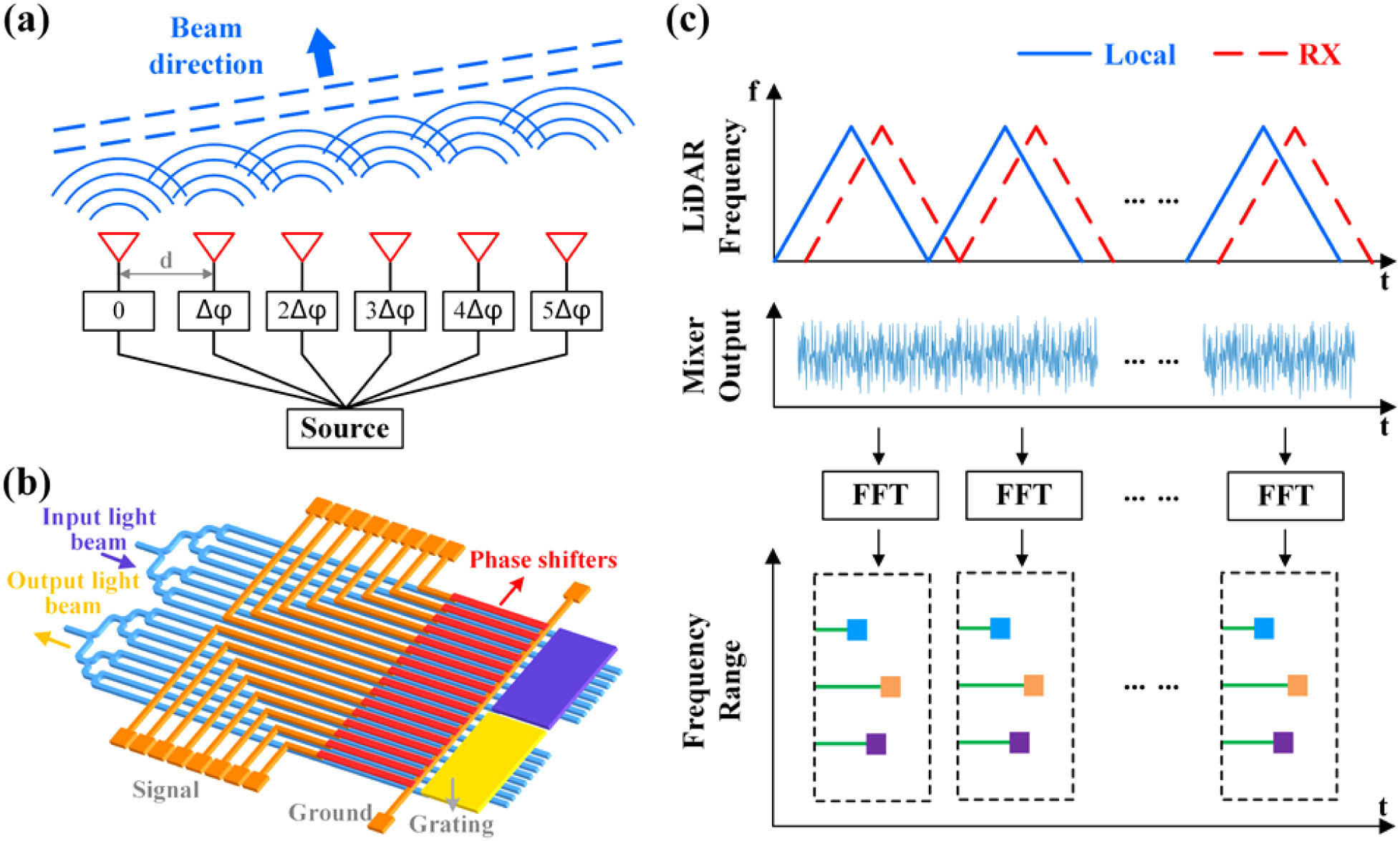
Fig. 1. (a) Principle of optical phased array (OPA) beam steering. (b) Structural design of the OPA chip. (c) Distance resolution principle of frequency-modulated continuous waves (FMCWs).
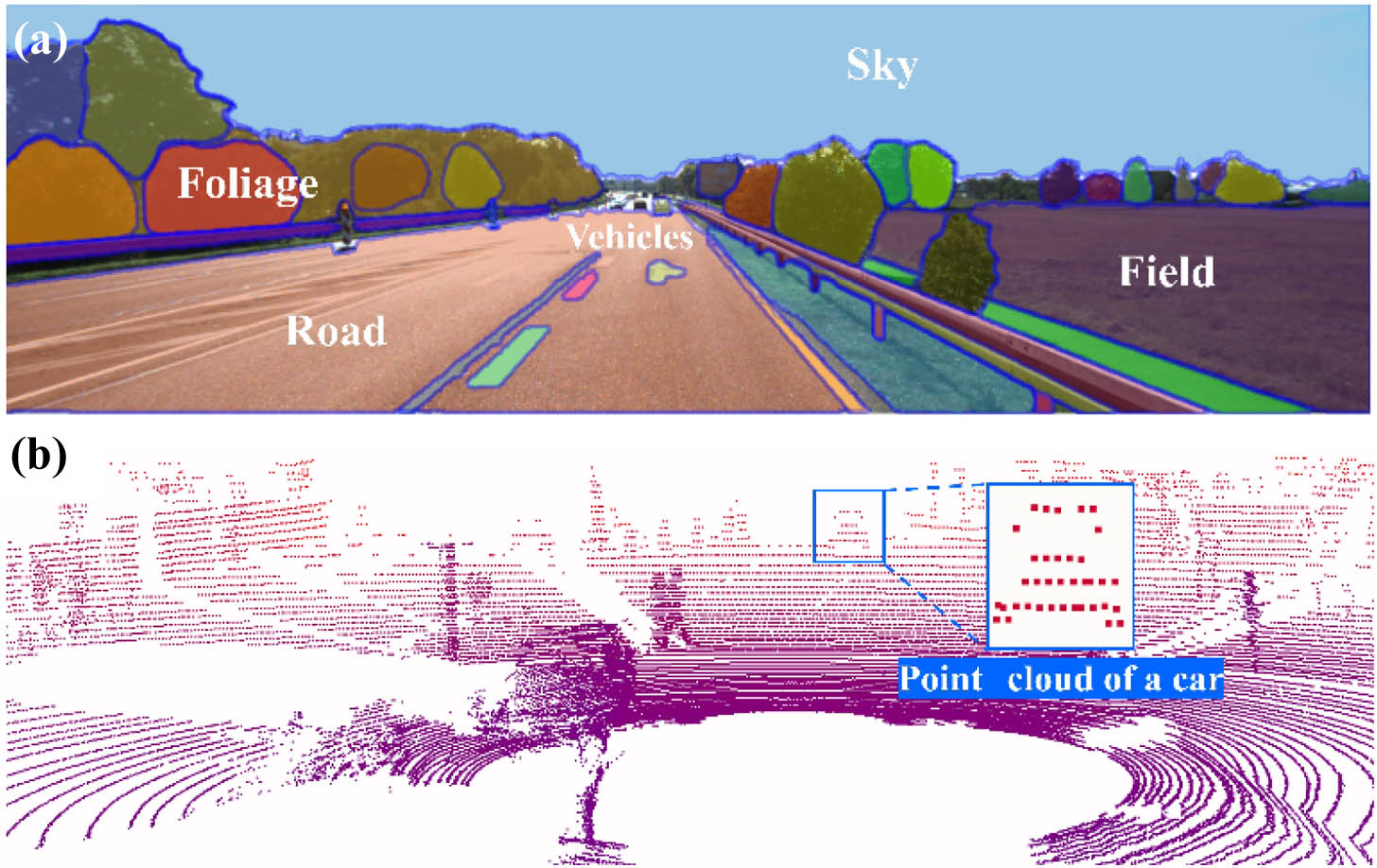
Fig. 2. (a) Target distribution in various traffic scenarios. (b) Lidar sensor-captured point cloud in a specific traffic scenario.
Fig. 3. Schematic of camera and lidar coordinate system.
Fig. 4. Schematic representation of the target-adaptive 3D imaging method.
Fig. 5. (a) Statistical distribution of point clouds across target types in varied scenarios. (b) Proportional analysis of targets across 1000 randomized images in various scenarios.
Fig. 6. (a) Test system and scenario. (b) Calibration board. (c) Target to be tested.
Fig. 7. (a) Schematic depiction of FMCW-based OPA lidar test system. (b) Up-chirp and down-chirp results of the FMCW system. (c) OPA testing board. (d) Micrograph of the Vernier OPA chip.
Fig. 8. Joint calibration of the camera and lidar. (a) Photographic representation of the calibration board. (b) Point cloud of the calibration board.
Fig. 9. Results of joint calibration errors. (a) Translation errors. (b) Rotation errors. (c) Reprojected errors.
Fig. 10. (a) Test scene image. (b) Global uniform scanning of test scene.
Fig. 11. (a) Point cloud of the coarse scanning. (b) Depth map using interpolation. (c) Target prediction box of the key object. (d) Point cloud of the 3D target region in the formal scanning.
Fig. 12. (a) Mask of the mannequin model. (b) Point cloud image obtained through target-adaptive method.
|
Table 1. Comparison of Quantity and Distribution of Point Clouds Required for Global Uniform Scanning with Target-adaptive Methoda


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20