
Chunyang Wang, Guorui Li, Xuelian Liu, Chunhao Shi, Wenqian Qiu. 3D point cloud registration algorithm with IVCCS[J]. Infrared and Laser Engineering, 2022, 51(6): 20210491
- Infrared and Laser Engineering
- Vol. 51, Issue 6, 20210491 (2022)
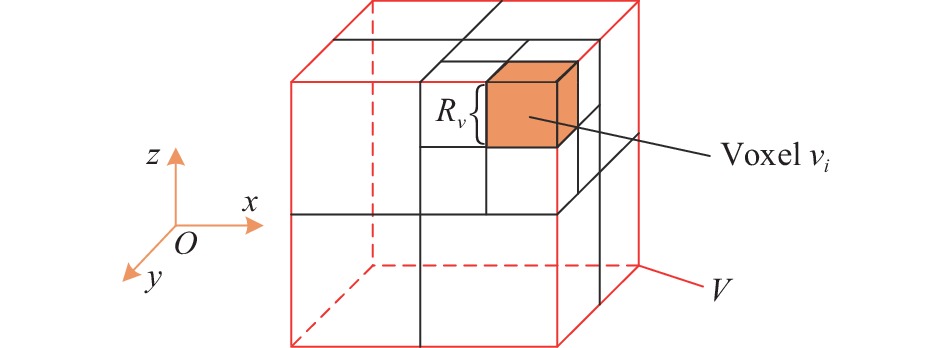
Fig. 1. Schematic diagram of spatial voxelization
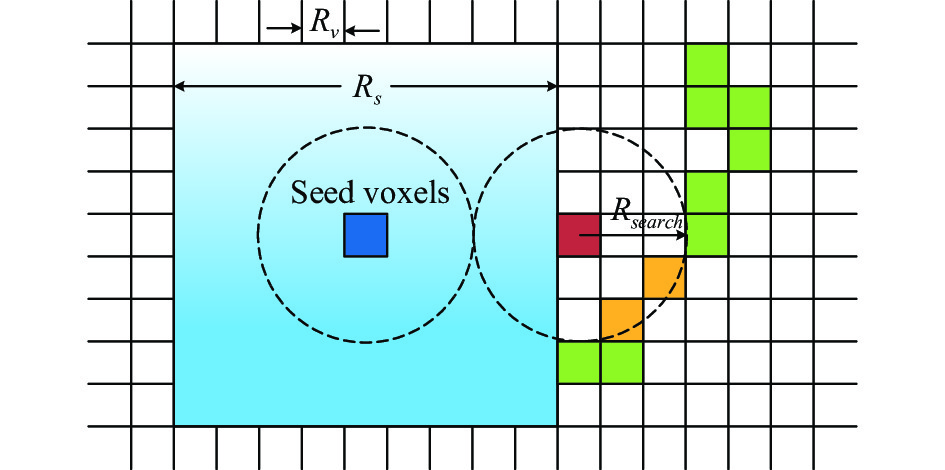
Fig. 2. Schematic diagram of voxelization and meshing parameters
Fig. 3. Search order of stream-constrained clustering algorithm
Fig. 4. Schematic diagram of small threshold denoising
Fig. 5. Schematic diagram of large threshold denoising
Fig. 6. Flow chart of IVCCS algorithm
Fig. 7. (a) VCCS and (b) IVCCS
Fig. 8. Visualization effect of Gazebo data registration
Fig. 9. Visual effect of data registration with noise
Fig. 10. Images taken by cameras with different viewing angles
Fig. 11. Point cloud images scanned by radar at different viewing angles
Fig. 12. Visual effect of car data registration
Fig. 13. Actual collected data of the library
Fig. 14. Visual effect of library data registration
Fig. 15. Actual collected data of the panzer
Fig. 16. Visual effect of panzer data registration
|
Table 1. Segment size of partial point cloud model in the data set
|
Table 2. Statistics of experimental results of Gazebo ideal data
|
Table 3. Statistics of experimental results of the algorithm before and after improvement
|
Table 4. Statistics of noise data results
|
Table 5. Actual collected data segment size
|
Table 6. Statistics of car data results
|
Table 7. Statistics of library data results
|
Table 8. Statistics of library data results

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20