
Wanting Song, Wensong Jiang, Zai Luo. Rapid Batch Three-Dimensional Reconstruction of Point Clouds Based on Multi-Label Classification[J]. Laser & Optoelectronics Progress, 2021, 58(12): 1210001
- Laser & Optoelectronics Progress
- Vol. 58, Issue 12, 1210001 (2021)

Fig. 1. Preprocessing flow chart of 3D point clouds for neural network
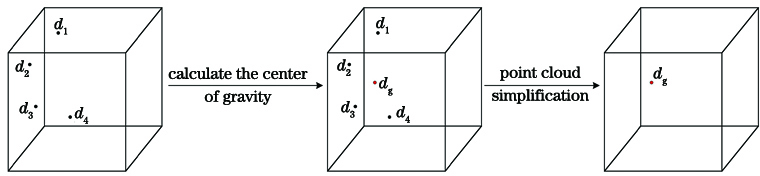
Fig. 2. Schematic diagram of voxel grid algorithm
Fig. 3. Subject point cloud and noise point cloud
Fig. 4. Model architecture for point clouds classification
Fig. 5. Delaunay triangulation. (a) Insert point; (b) judgement of the common inner edge using empty circumcircle; (c) delete the inner edge; (d) insert completed
Fig. 6. Overall flow chart
Fig. 7. Example diagrams of 3D models. (a) Sphere; (b) cube; (c) cylinder; (d) penetrant; (e) open-source table point cloud set; (f) open-source chair point cloud set
Fig. 8. Comparison of denoising effect of the standard ball. (a) k-neighbor denoising algorithm; (b) radius filtering algorithm; (c) proposed denoising algorithm
Fig. 9. Comparison of denoising effect of the standard gauge block: (a) k-neighbor denoising algorithm; (b) radius filtering algorithm; (c) proposed denoising algorithm
Fig. 10. Comparison of denoising effect of the standard cylinder: (a) k-neighbor denoising algorithm; (b) radius filtering algorithm; (c) proposed denoising algorithm
Fig. 11. Comparison of denoising effect of the open-source table point cloud set: (a) k-neighbor denoising algorithm; (b) radius filtering algorithm; (c) proposed denoising algorithm
Fig. 12. Processing flow
Fig. 13. Relationship between reconstruction number and reconstruction time when the number of point clouds is 100000
Fig. 14. Relationship between reconstruction number and reconstruction time when the number of point clouds is 700000
Fig. 15. Relationship between reconstruction number and reconstruction time when the number of point clouds is 1200000
|
Table 1. Number of point clouds after denoising by the three methods
| ||||||||||||||||||||||||||||||||||
Table 2. Comparison of the time required for point cloud preprocessing
| ||||||||||||||||||||||||
Table 3. Comparison of point cloud number after preprocessing
|
Table 4. Comparison of accuracy
|
Table 5. Comparison of reconstruction time when the number of point clouds is 100000
|
Table 6. Comparison of reconstruction time when the number of point clouds is 700000
|
Table 7. Comparison of reconstruction time when the number of point clouds is 1200000

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20