
Zuowei Huang, Feng Liu, Guangwei Hu. Improved Method for LiDAR Point Cloud Data Filtering Based on Hierarchical Pseudo-Grid[J]. Acta Optica Sinica, 2017, 37(8): 0828004
- Acta Optica Sinica
- Vol. 37, Issue 8, 0828004 (2017)
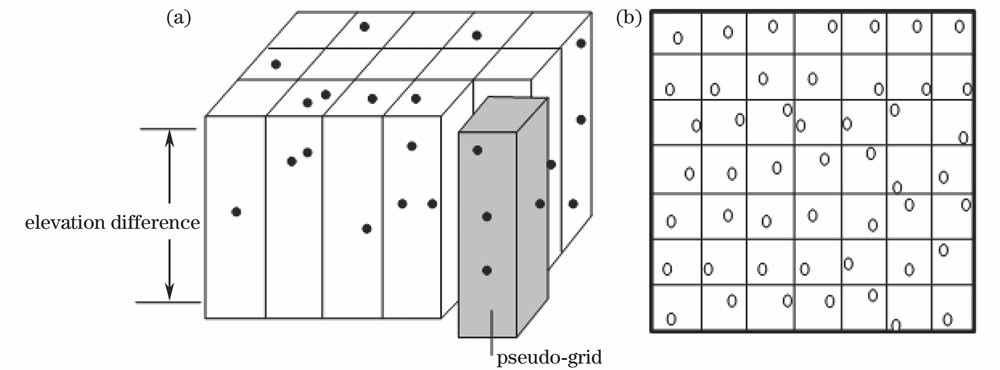
Fig. 1. Schematic diagram of pseudo-grid. (a) Three-dimensional display; (b) two-dimensional display
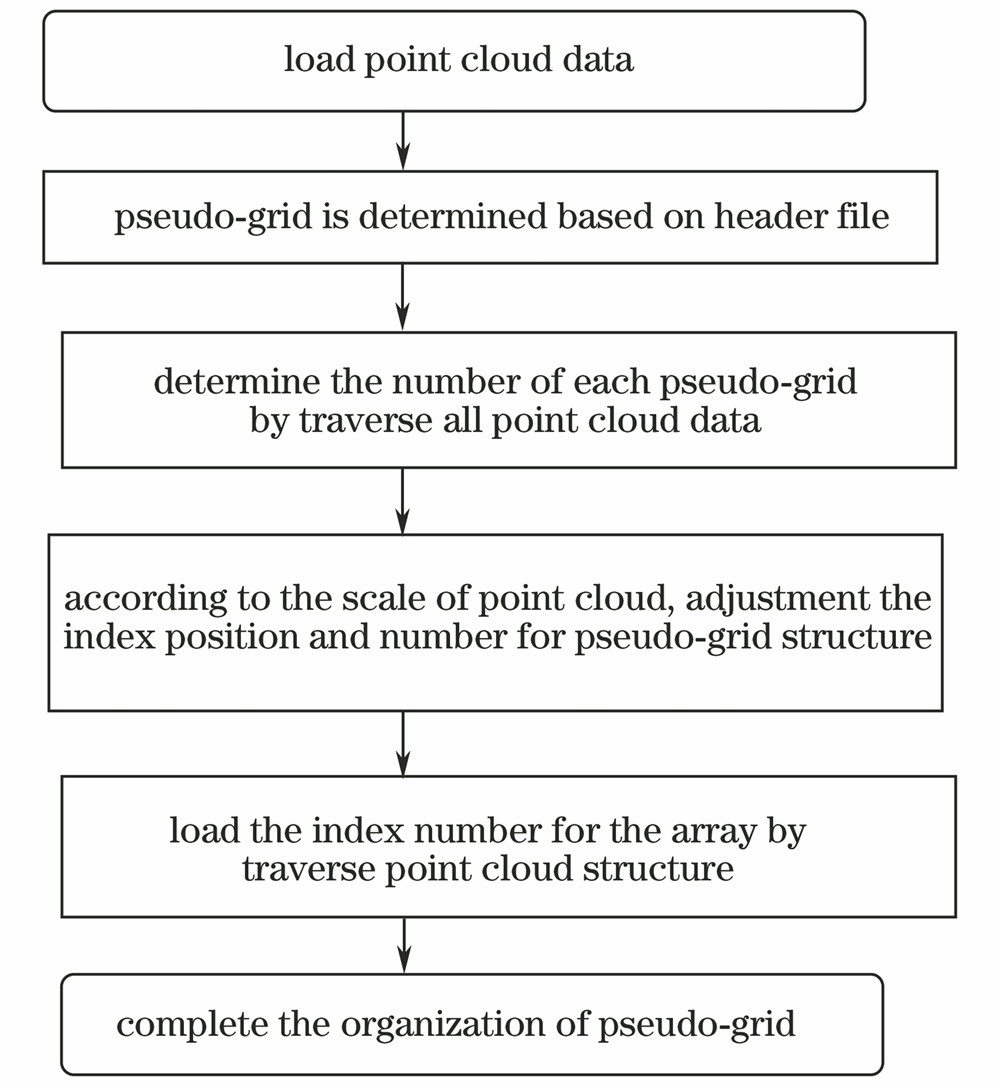
Fig. 2. Construction process of pseudo-grid
Fig. 3. Flow chart of improved filtering algorithm
Fig. 4. Filtering flow chart based on CUDA
Fig. 5. Filtering result of sample 11. (a) DSM of sample data; (b) result after filtering with slope method; (c) result after filtering with the improved method; (d) real DEM provide by ISPRS; (e) error distribution map
Fig. 6. Comparison of type II error with different algorithms
Fig. 7. Comparison of processing time with different algorithms
Fig. 8. Experimental data. (a) Original point cloud data; (b) DSM grey-scale map of after meshing
Fig. 9. Experiment results. (a) Filtering result of this method; (b) filtering result of progressive TIN filtering algorithm; (c) filtering result of slope filtering algorithm; (d) DEM after filtering
|
Table 1. Attributes of filtering data
|
Table 2. Parameters of data filtering
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Filtering error statistics of three groups data under different parameters
|
Table 4. Comparison table of filtering error and efficiency of different algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20