- Spectroscopy and Spectral Analysis
- Vol. 41, Issue 8, 2565 (2021)
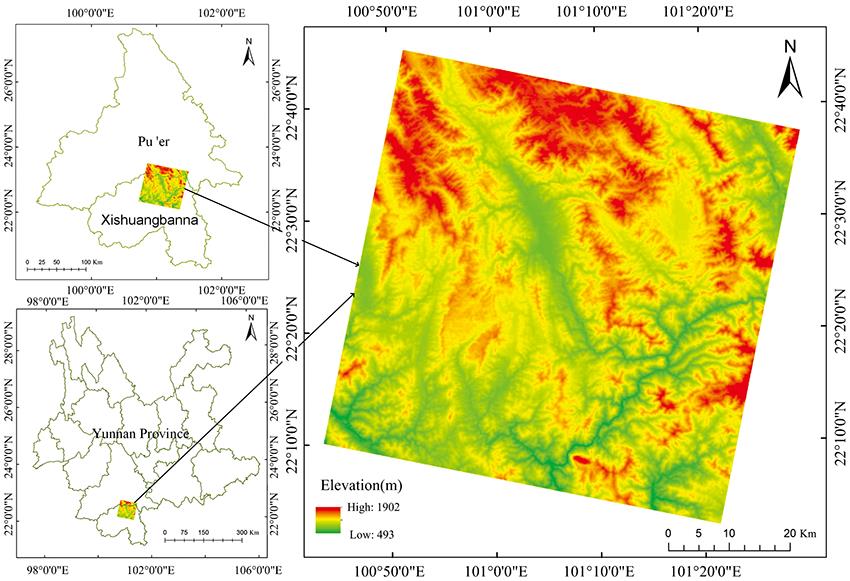
Fig. 1. Schematic diagram of study area
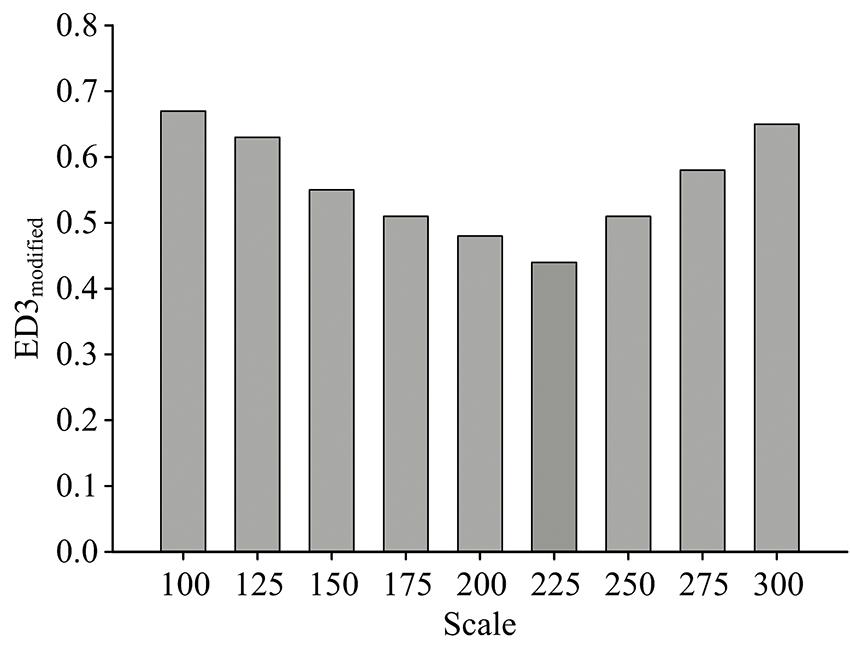
Fig. 2. The ED3Modified values vs the segmentation scale
Fig. 3. Image segmentation results at different scales
Fig. 4. Evaluation of the optimal feature spaces dimensions
Fig. 5. Extraction results of random forest tea plantations
Fig. 6. Comparison of the object-oriented and pixel-based classifications
|
Table 1. The features of object-oriented classification
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Comparison of the accuracies of object-oriented supervision classification
| |||||||||||||||||||||||||||||||||||||
Table 3. Comparison of the accuracies of pixel-wise RF and object-oriented RF for tea plantations extraction

Download Citation

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20