
Zhoujuan Cui, Junshe An, Yufeng Zhang, Tianshu Cui. Light-Weight Siamese Attention Network Object Tracking for Unmanned Aerial Vehicle[J]. Acta Optica Sinica, 2020, 40(19): 1915001
- Acta Optica Sinica
- Vol. 40, Issue 19, 1915001 (2020)
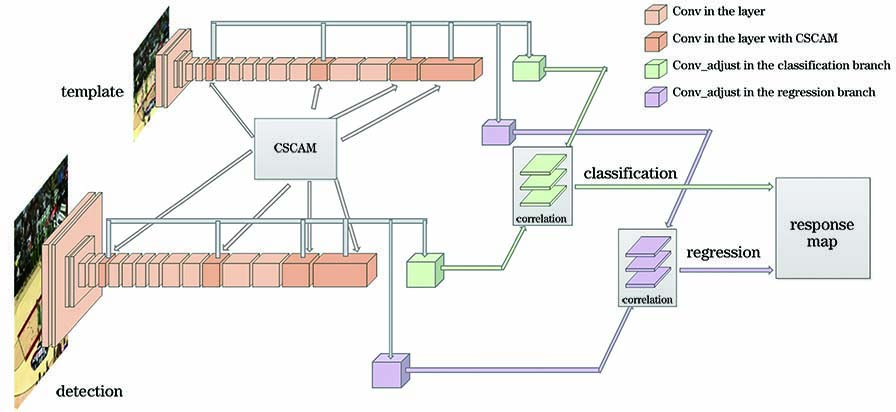
Fig. 1. Framework of Siamese network with channel spatial coordination attention module
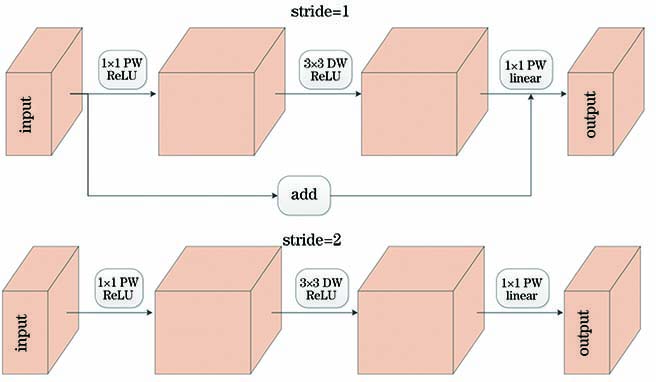
Fig. 2. Convolutional blocks of MobileNetV2
Fig. 3. Convolution process abstract graph of MobileNetV2
Fig. 4. Grad-CAM network visualization results. (a) No attention module; (b) with attention module
Fig. 5. Channel spatial coordination attention module
Fig. 6. Success rate comparison of different attention module combinations on OTB-2015
Fig. 7. Precision comparison of different attention module combinations on OTB-2015
Fig. 8. Qualitative results of the nine tracking algorithms on different video sequences. (a) car6_5; (b) car17; (c) person9; (d) person1_s; (e) uav4; (f) wakeboard6
Fig. 9. Results of problem sequence on uav1_1
Fig. 10. Results of the tracking algorithms on OTB-2015. (a) Success plot; (b) precision plot
Fig. 11. Tracking success plots of different attributes videos. (a) Scale variation; (b) aspect ratio change; (c) low resolution; (d) fast motion; (e) full occlusion; (f) partial occlusion; (g) out-of-view; (h) background clutter; (i) illumination variation; (j) viewpoint change; (k) camera motion; (l) similar object
Fig. 12. Tracking precision plots of different attributes videos. (a) Scale variation; (b) aspect ratio change; (c) low resolution; (d) fast motion; (e) full occlusion; (f) partial occlusion; (g) out-of-view; (h) background clutter; (i) illumination variation; (j) viewpoint change; (k) camera motion; (l) similar object
Fig. 13. Quantitative analysis of some video sequences. (a) Scale variation and aspect ratio change; (b) CLE
|
Table 1. Architecture of Siamese network based on MobieleNetV2

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20