
Hang Yang, Gong Zhao, Qiang Zhang, Yulan Wang, Wen Huang, Jianguo He, Yang Jia. Aspherical Finishing Post Processing Method Based on Trust Region Dogleg Method[J]. Laser & Optoelectronics Progress, 2020, 57(5): 052202
- Laser & Optoelectronics Progress
- Vol. 57, Issue 5, 052202 (2020)
Fig. 1. Spatial topological relationship between j and its lower-order body i
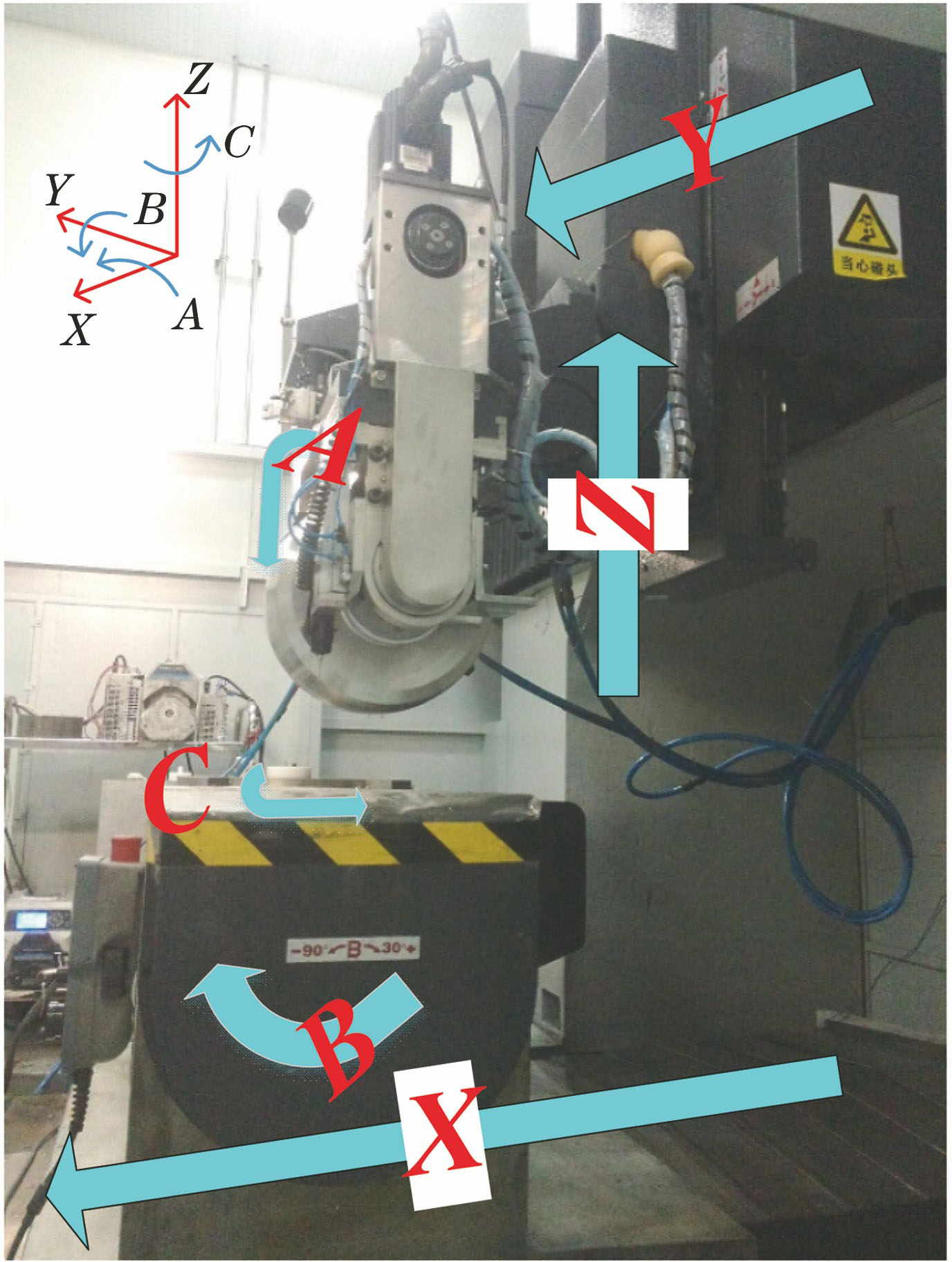
Fig. 2. Physical structure of self-developed PKC magnetorheological finishing machine
Fig. 3. Spatial topology of PKC magnetorheological finishing machine
Fig. 4. Kinematic model of a magnetorheological finishing machine
Fig. 5. Different trajectory planning results. (a) Raster line path planning; (b) spiral line path planning
Fig. 6. Axis control under different trajectories. (a) Raster line path; (b) spiral line path
|
Table 1. Low-order topology array of magnetorheological finishing machine
|
Table 2. Iteration convergence rate of finishing

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20