
Xinxin Huang, Yongjie Ren, Keyao Ma, Zhiyuan Niu. Visual-Inertial Adaptive Fusion Algorithm Based on Measurement Uncertainty[J]. Acta Optica Sinica, 2023, 43(21): 2112003
- Acta Optica Sinica
- Vol. 43, Issue 21, 2112003 (2023)
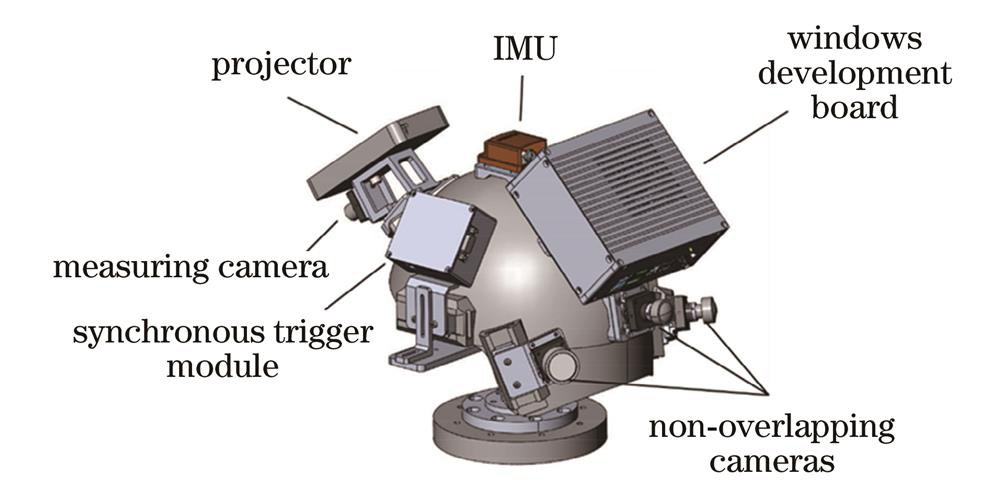
Fig. 1. Immersive positioning and measuring helmet

Fig. 2. Flow chart of the adaptive filtering fusion positioning algorithm
Fig. 3. Experiment scene
Fig. 4. Measurement uncertainty of visual positioning. (a) Translation in X axis; (b) translation in Y axis; (c) translation in Z axis; (d) rotation around X axis; (e) rotation around Y axis; (f) rotation around Z axis
Fig. 5. Motion curve of T-mac and helmet system
Fig. 6. Motion curves of visual position, ESKF, and proposed method
Fig. 7. Relative pose between T-mac and helmet system. (a) Translation in X axis; (b) translation in Y axis; (c) translation in Z axis; (d) rotation around X axis; (e) rotation around Y axis; (f) rotation around Z axis
|
Table 1. Extrinsic parameters from world coordinate system to laser tracker coordinate system
|
Table 2. Standard deviation of relative pose of measurement sequence with small uncertainty of visual positioning
|
Table 3. Standard deviation of relative pose of measurement sequence with large uncertainty of visual positioning

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20