
Caidong Wang, Fengyang Liu, Zhihang Li, Zhihong Chen, Yan Cheng, Huadong Zheng. Research on Image Mosaic Method Based on Binocular Vision Feature Point Matching[J]. Laser & Optoelectronics Progress, 2021, 58(12): 1211002
- Laser & Optoelectronics Progress
- Vol. 58, Issue 12, 1211002 (2021)
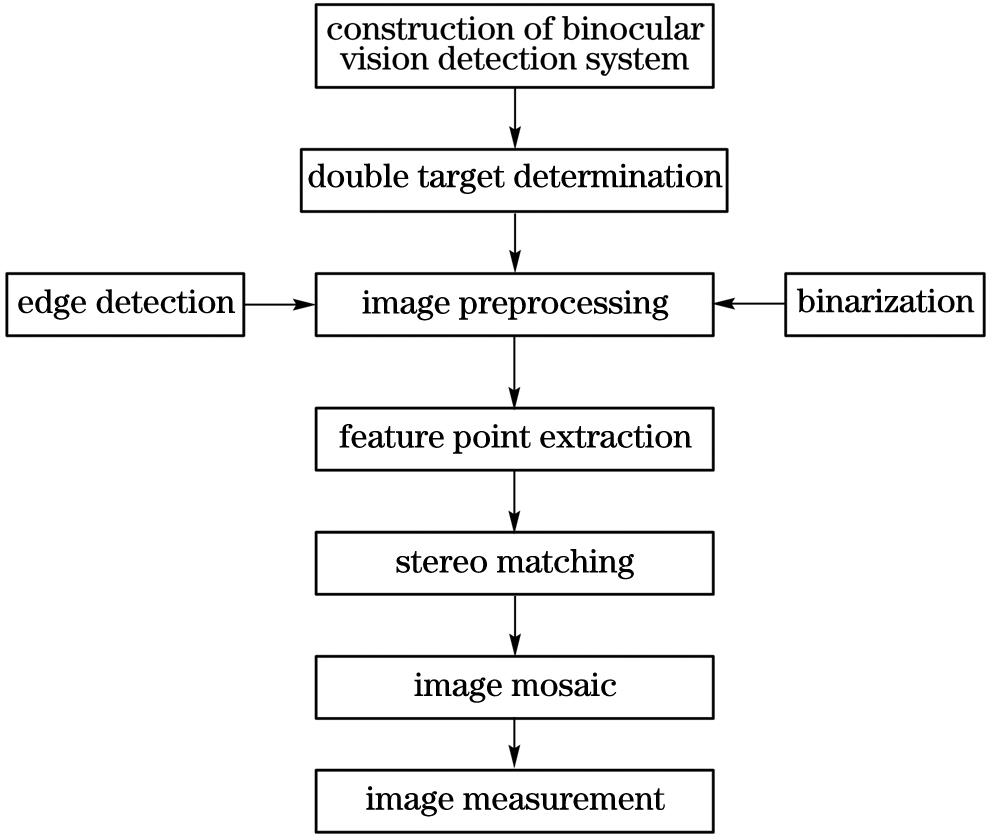
Fig. 1. Image mosaic process based on feature point matching
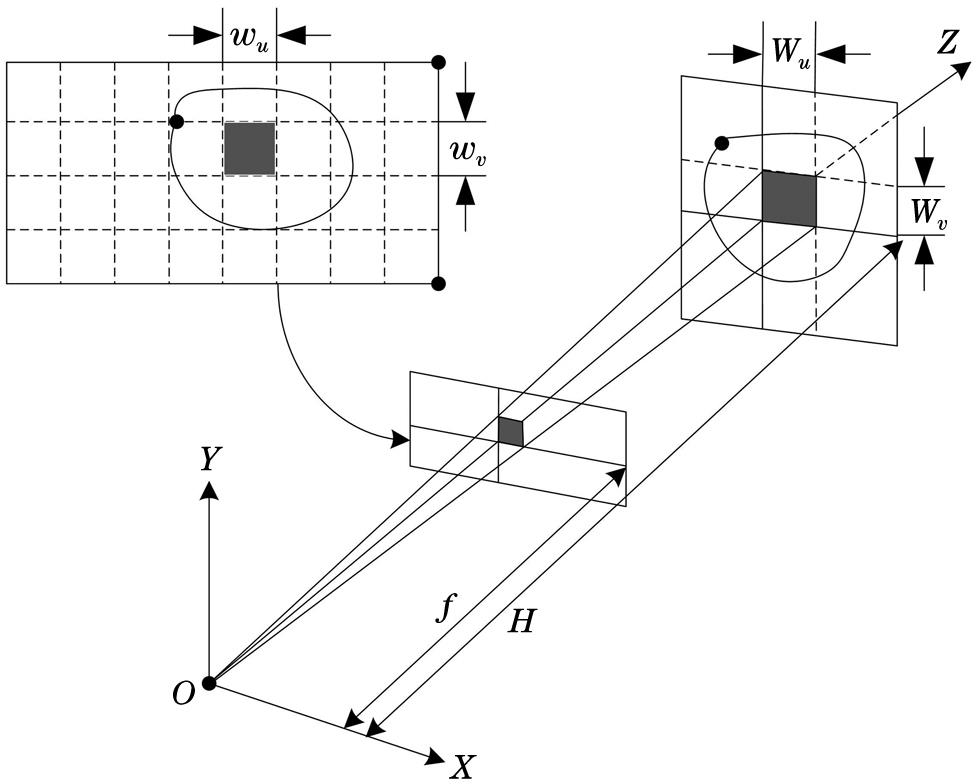
Fig. 2. Principle of area measurement of characteristic region of workpiece
Fig. 3. Platform of flexible vision detection system
Fig. 4. Relationship between feature dimension and matching rate
Fig. 5. Results of image mosaic process. (a) Detection results of feature points; (b) coarse matching of feature points; (c) precision matching of feature points; (d) mosaic image
Fig. 6. Mosaic image after fusion
Fig. 7. Mosaic imageⅠ
Fig. 8. Mosaic imageⅡ
Fig. 9. Complete workpiece image
Fig. 10. Process of screening characteristic areas. (a) Binary image Ⅰ; (b) binary image Ⅱ; (c) binary image Ⅲ; (d) connected domain after screening
Fig. 11. Labeling of geometric figures
Fig. 12. Contrast curve of radius of workpiece circular hole
Fig. 13. Relative error of radius of circular hole
|
Table 1. Parameters of MV-EM200M camera
|
Table 2. Test results for different algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20