
Faling Chen, Qinghai Ding, Zheng Chang, Hongyu Chen, Haibo Luo, Bin Hui, Yunpeng Liu. Multi-Scale Kernel Correlation Filter Algorithm for Visual Tracking Based on the Fusion of Adaptive Features[J]. Acta Optica Sinica, 2020, 40(3): 0315001
- Acta Optica Sinica
- Vol. 40, Issue 3, 0315001 (2020)

Fig. 1. Schematic of adaptive features fusion process
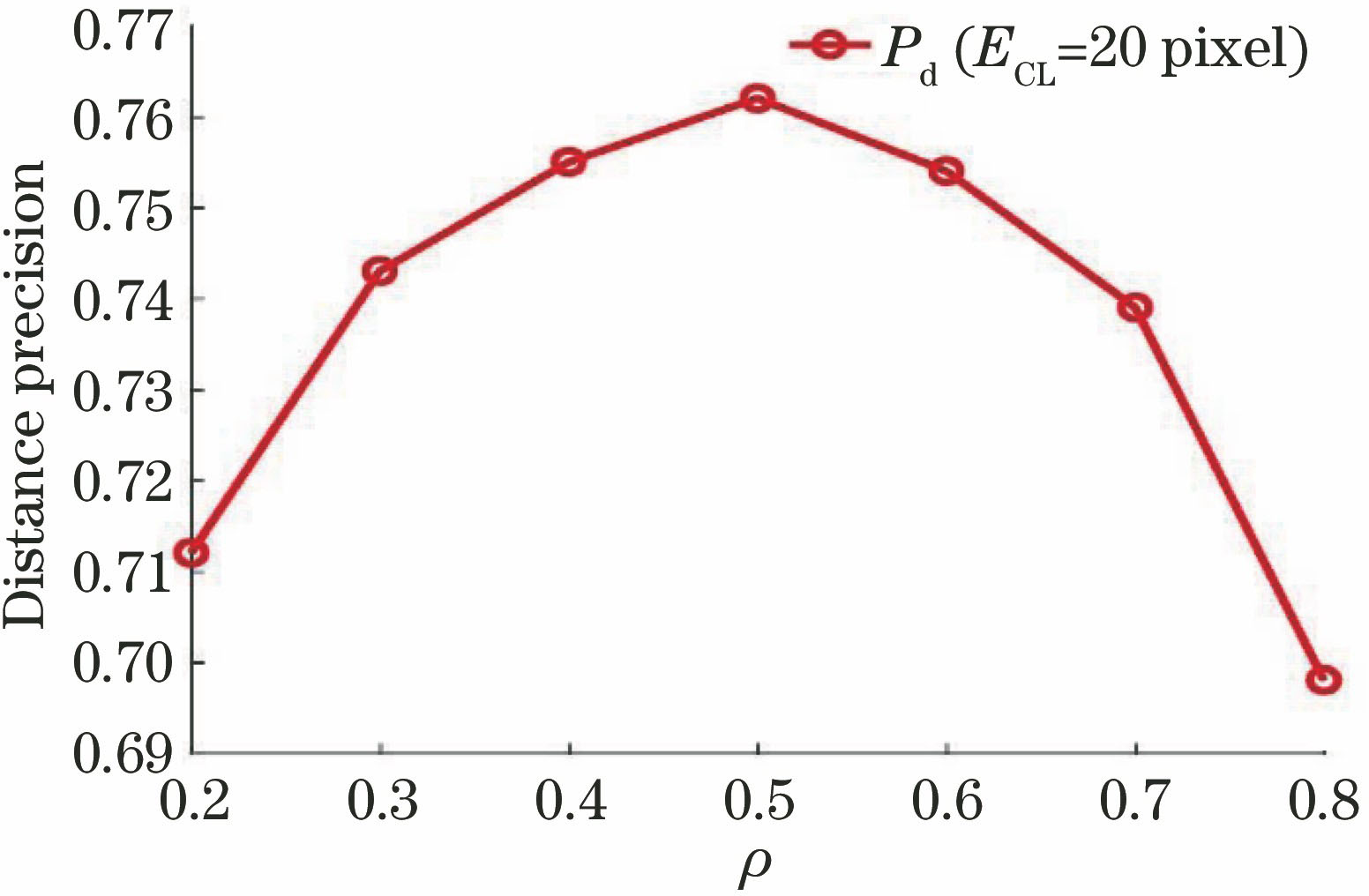
Fig. 2. Relationship between weight adjustment ρ and the target tracking performance
Fig. 3. Distance precision curves and overlap precision curves of three target tracking algorithms. (a) Distance precision; (b) overlap precision
Fig. 4. Comparisons of estimated scale by the proposed algorithm and actual scale on four sequences.(a) Blurcar2; (b) Dog1; (c) Doll; (d) Carscale
Fig. 5. Distance precision curves and overlap precision curves of different target tracking algorithms. (a) Distance precision; (b) overlap precision
Fig. 6. Comparison of tracking results among five algorithms on David sequence
Fig. 7. Comparison of tracking results among five algorithms on Basketball sequence
Fig. 8. Comparison of tracking results among five algorithms on Carscale sequence
Fig. 9. Comparison of tracking results among five algorithms on Jogging1 sequence
Fig. 10. Comparison of tracking results among five algorithms on Trellis sequence
Fig. 11. Comparison of tracking results among five algorithms on Trellis sequence
|
Table 1. Tracking results of the proposed algorithm on four scale variation sequences
|
Table 2. Pd scores of the top ten algorithms on eleven attributes
|
Table 3. Po of the top ten algorithms on eleven attributes

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20