
Shangtai Gu, ling Wang, Yanxin Ma, Chao Ma. Local Feature Description of LiDAR Point Cloud Data Based on Hierarchical Mercator Projection[J]. Acta Optica Sinica, 2020, 40(20): 2015001
- Acta Optica Sinica
- Vol. 40, Issue 20, 2015001 (2020)
Fig. 1. Schematic diagram of hierarchical Mercator projection
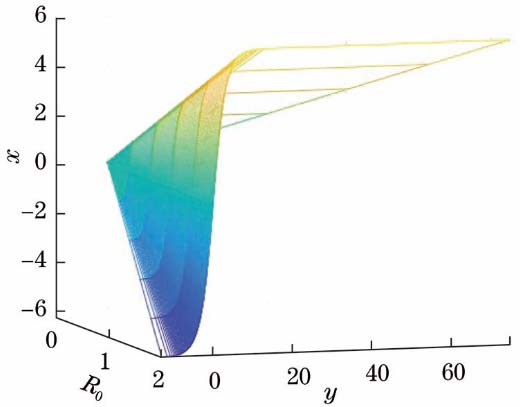
Fig. 2. Plane of hierarchical Mercator projection (5 layers)
Fig. 3. Flow chart of hierarchical Mercator projection (3 layers)
Fig. 4. Influence of the number of Mercator projection layers on the recognition performance of the algorithm (Bologna dataset)
Fig. 5. Influence of the number of Mercator projection layers on the recognition performance of the algorithm (3DMatch dataset)
Fig. 6. PRC of different feature extraction algorithms. (a) Noise variance is 0.3 times point cloud resolution; (b) noise variance is 0.5 times point cloud resolution; (c) noise variance is 0.8 times point cloud resolution; (d) noise variance is 1.5 times point cloud resolution rate
|
Table 1. Runtime and average precision of hierarchical Mercator projection (Bologna dataset)
|
Table 2. Runtime and average precision of hierarchical Mercator projection (3DMatch dataset)
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Average accuracy and operation time of different feature extraction algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20