
Bingqing Xu, Yan Han, Wenjing Xu, Jun Zheng, Dongsong Sun. Design and simulation of Raman lidar with small field of view for atmospheric temperature and humidity detection[J]. Infrared and Laser Engineering, 2021, 50(9): 20200410
- Infrared and Laser Engineering
- Vol. 50, Issue 9, 20200410 (2021)
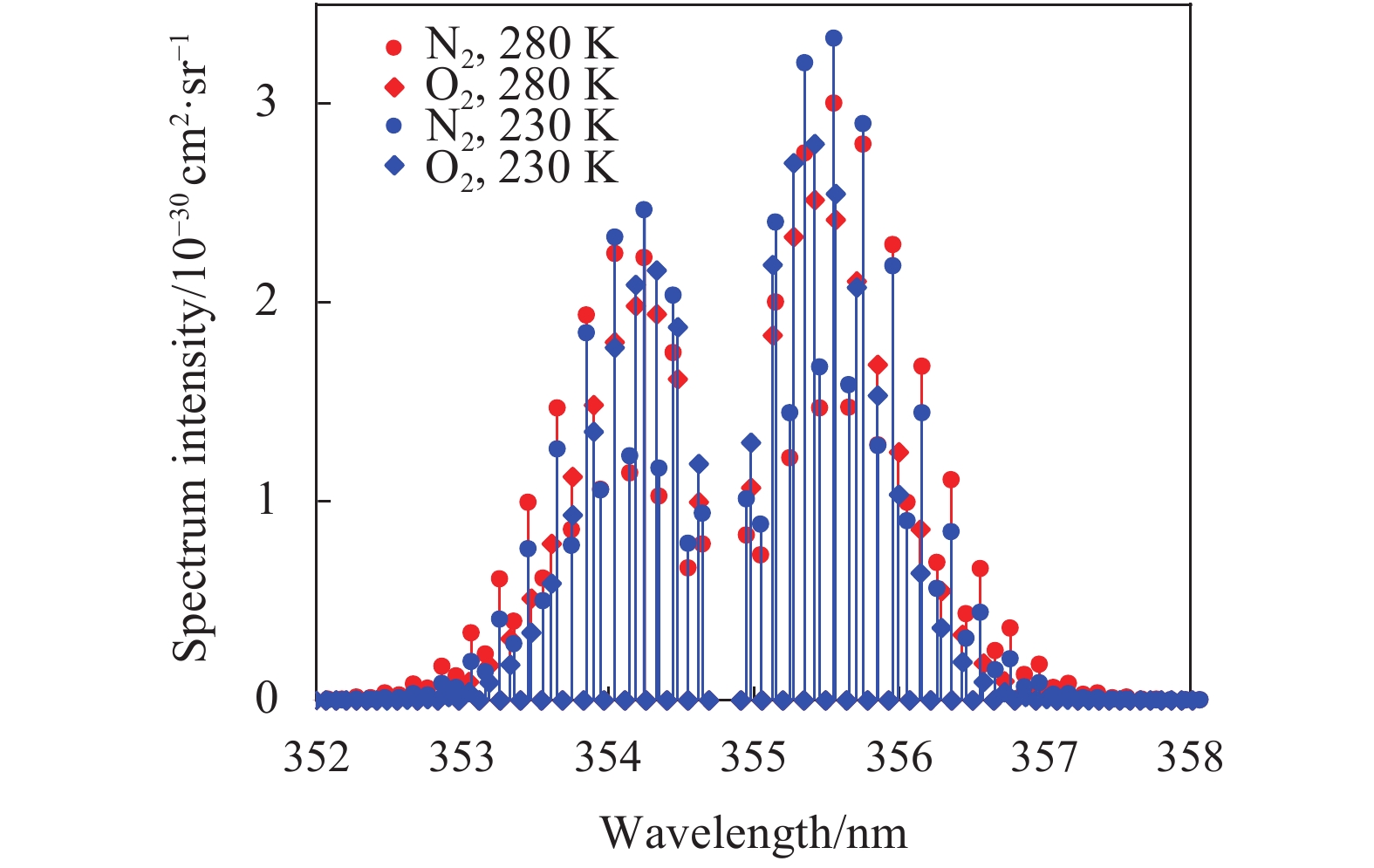
Fig. 1. Pure rotational Raman spectrum of N2 and O2
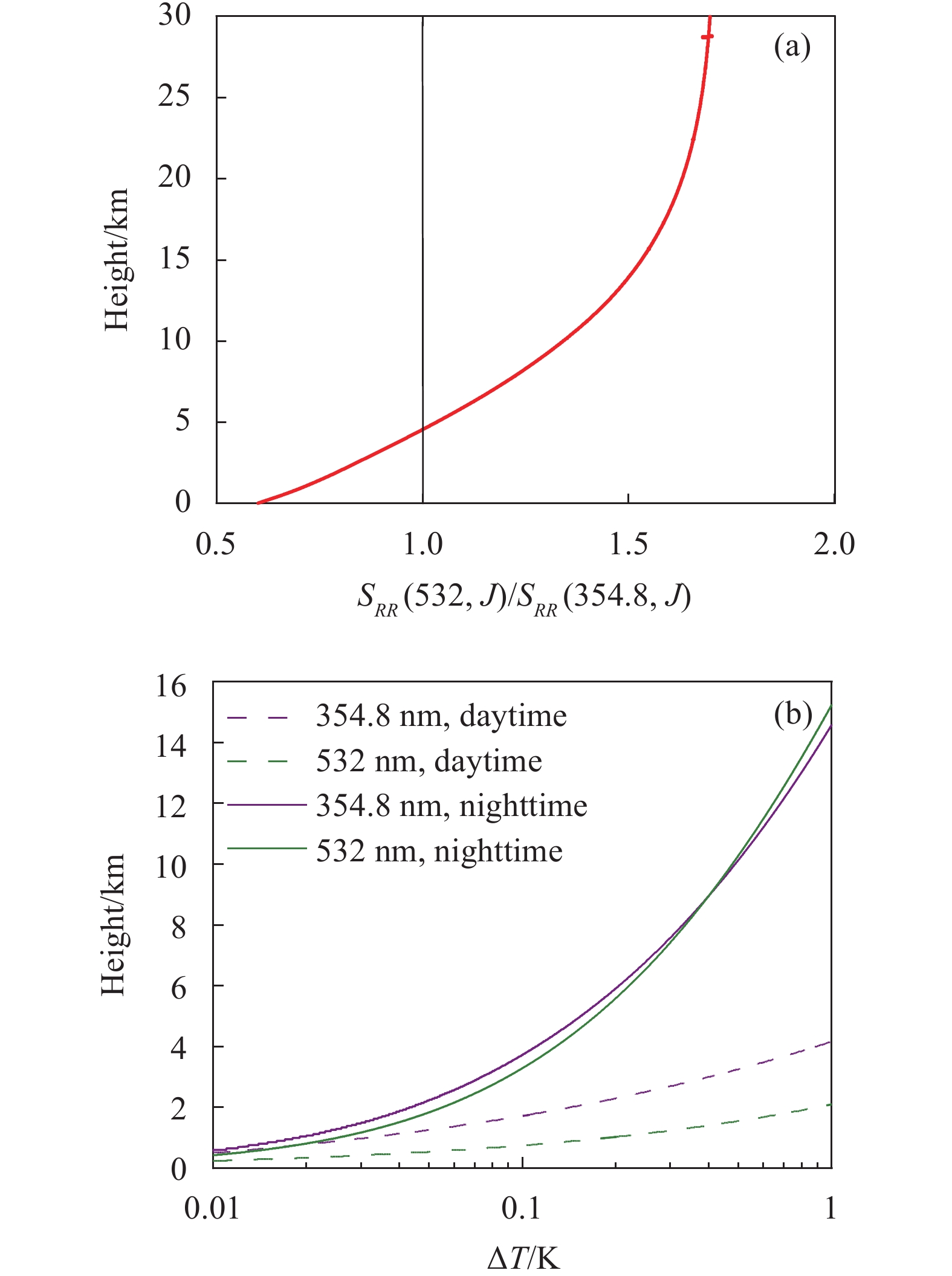
Fig. 2. (a) Ratio of rotational Raman echo signal intensities
; (b) Comparison of statistical temperature uncertainty between 532 nm and 354.8 nm Raman lidar systems
(a)转动拉曼回波信号强度之比
;(b) 532 nm和354.8 nm拉曼激光雷达系统温度不确定度的比较
Fig. 3. Light path diagram of the Raman lidar system
Fig. 4. Temperature sensitivity of pure rotational Raman signals
Fig. 5. Statistical temperature uncertainty versus filter center wavelength for different filter bandwidth in the daytime. (a) Δλ 1=Δλ 2=0.1 nm; (b) Δλ 1=Δλ 2=0.3 nm; (c) Δλ 1=0.3 nm, Δλ 2=0.5 nm; (d) Δλ 1=0.3 nm, Δλ 2=0.8 nm
Fig. 6. Statistical temperature uncertainty versus filter center wavelengths. (a), (b) Contour map of the variation of the statistical temperature uncertainty in daytime and nighttime detection with central wavelength CWL1 and CWL2; (c), (d) CWL1 takes a fixed value, the statistical temperature uncertainty changes with CWL2 in daytime and nighttime; (e), (f) CWL2 takes a fixed value, the statistical temperature uncertainty changes with CWL1 in daytime and nighttime
Fig. 7. Contour map of statistical temperature uncertainty varying with optical density
Fig. 8. (a) Statistical temperature uncertainty; (b) Statistical error of water vapor mixing ratio in the daytime
|
Table 1. Simulation parameters of Raman lidar system
|
Table 2. Key parameters of Raman lidar system
|
Table 3. Average value of statistical temperature uncertainty
|
Table 4. Parameters of interference filter


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20