
Jiansi Liu, Liju Yin, Jinfeng Pan, Yumin Cui, Xiangyu Tang. Edge Detection Algorithm for Unevenly Illuminated Images Based on Parameterized Logarithmic Image Processing Model[J]. Laser & Optoelectronics Progress, 2021, 58(22): 2210005
- Laser & Optoelectronics Progress
- Vol. 58, Issue 22, 2210005 (2021)
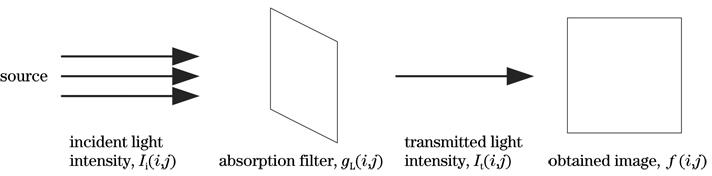
Fig. 1. Processing of transmitted images under LIP model

Fig. 2. Under the LIP model, two images are added together
Fig. 3. Processing process of φ function
Fig. 4. Processing process of φ-1 function
Fig. 5. Four-direction Sobel operator templates. (a) x-axis direction template; (b) y-axis direction template; (c) 45° direction template; (d) 135° direction template
Fig. 6. 3 pixel×3 pixel area
Fig. 7. Gradient image comparison results. (a) Test image; (b) gradient image of proposed algorithm; (c) gradient image of Ref. [14] algorithm; (d) traditional Sobel algorithm gradient image
Fig. 8. Image of real experimental platform
Fig. 9. Internal structure of the experimental platform
Fig. 10. Principle block diagram of experimental platform
Fig. 11. Image of measured target. (a) Car image; (b) triangle base image; (c) triangle base and number plate combination image
Fig. 12. Results of algorithm flow. (a) Original image; (b) filtered image; (c) gradient image; (d) final result image
Fig. 13. Comparison of edge detection results. (a) Original image; (b) traditional Canny algorithm; (c) Sobel algorithm; (d) Ref. [14] algorithm; (e) proposed algorithm
| ||||||||||||||||||||||||
Table 1. Comparison of calculation time unit: s
|
Table 2. Evaluation of algorithm’s performance

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20