
Zhuoyuan YU, Guonian LV, Xining ZHANG, Yuanxin JIA, Chenghu ZHOU, Yong GE, Kejing LV. Pan-information-based High Precision Navigation Map: Concept and Theoretical Model [J]. Journal of Geo-information Science, 2020, 22(4): 760
- Journal of Geo-information Science
- Vol. 22, Issue 4, 760 (2020)
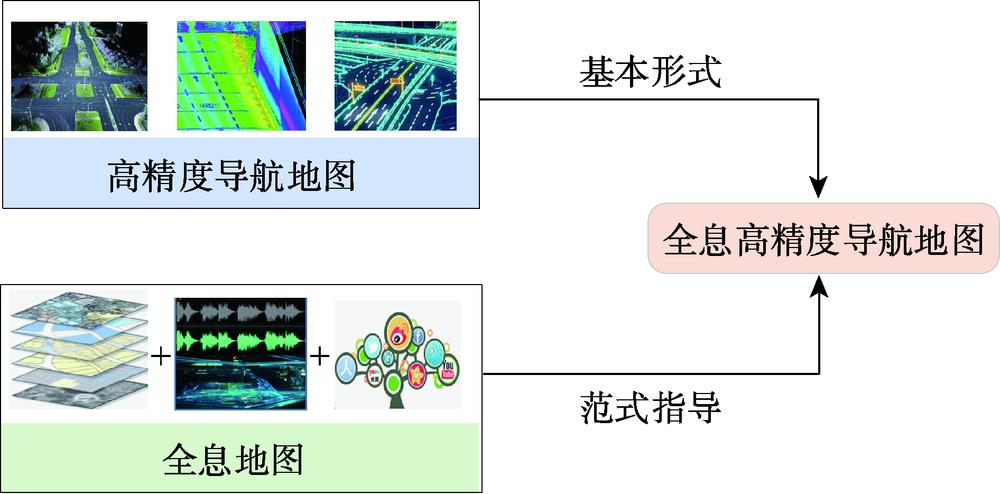
Fig. 1. The relationship among three kinds of maps
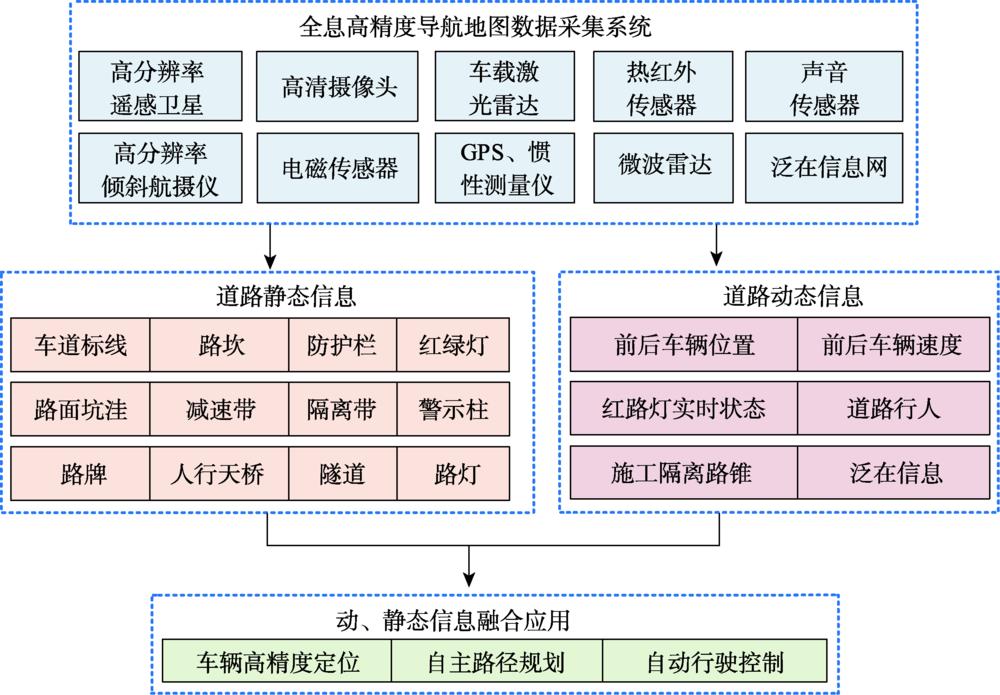
Fig. 2. Structure of pan-information-based high precision navigation map
Fig. 3. Flow chart of static information collection and extrac-tion of pan-information-based high precision navigation map
Fig. 4. Example of road point cloud data collected by UAV
Fig. 5. Lane line point cloud data extraction result
Fig. 6. Point cloud cube grid structure
Fig. 7. Lane line point cloud grid data processing result
Fig. 8. Lane line connection processing result
Fig. 9. Flow chart of dynamic information collection and ext-raction of pan-information-based high precision navigation map
Fig. 10. Pedestrian target recognition results
Fig. 11. Real-time traffic scene reconstruction based on sound data
Fig. 12. Schematic diagram of electromagnetic data spatialization results


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20