Zhuoyuan YU1,1,2,2, Guonian LV3,3,4,4,5,5, Xining ZHANG1,1,2,2, Yuanxin JIA1,1,2,2..., Chenghu ZHOU1,1,2,2, Yong GE1,1,2,2,* and Kejing LV1,1,2,2|Show fewer author(s)
Author Affiliations
1State Key Lab of Resources and Environmental Information System, Institute of Geographic Sciences and Natural Resources Research, Chinese Academy of Sciences, Beijing 100101, China1中国科学院地理科学与资源研究所 资源与环境信息系统国家重点实验室,北京 1001012University of Chinese Academy of Sciences, Beijing 100049, China2中国科学院大学,北京 1000493Key Laboratory of Virtual Geographic Environment, Ministry of Education, Nanjing Normal University, Nanjing 210023, China3南京师范大学 虚拟地理环境教育部重点实验室,南京 2100234Jiangsu Provincial Key Laboratory of Geographical Environment Evolution, Nanjing 210023, China4江苏省地理环境演化国家重点实验室培育建设点,南京 2100235Jiangsu Center for Collaborative Innovation in Geographical Information Resource Development and Application, Nanjing 210023, China5江苏省地理信息资源开发与利用协同创新中心,南京 210023show less
Abstract
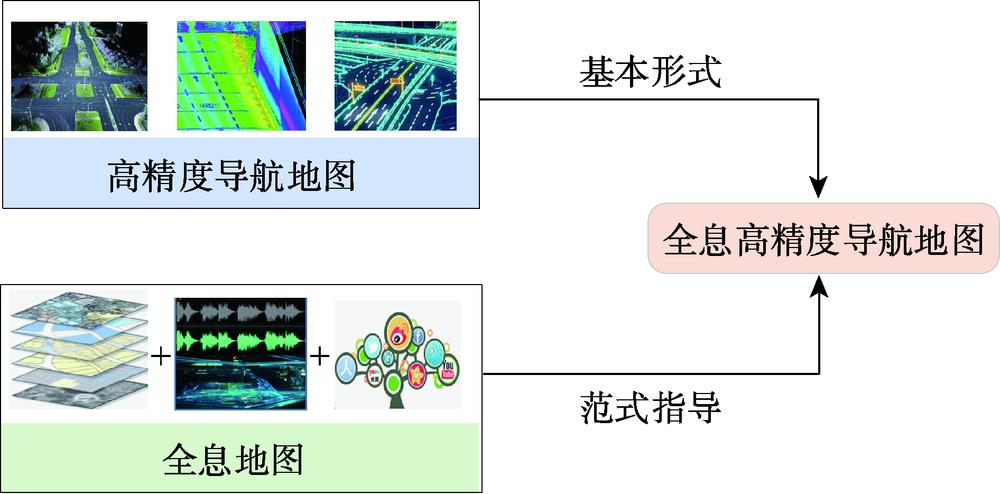
Map is intelligent product of human civilization. The rapid development of science and technology increased the diversity and readability of map. Based on the existing concepts and forms of map, this paper developed a concept of pan-information-based high precision navigation map.This new map concept was a kind of intelligent navigation map which was oriented to vehicle mobile operation and integrated more functions, such as environment perception, pan-features fusion, high-precision positioning and planning decision-making. It can collect and fuse different information based on unified data model for different application fields, and it was a brand-new map form. Key innovation of this map was capturing and fusing pan-information of road from multi-source sensors, especially electromagnetic sensors, sound sensors, thermal infrared instruments and the others, in order to provide information for navigation from more aspects. Based on this concept, a theoretical model framework of pan-information-based high precision navigation map with multi-source data fusion was proposed. This framework consisted of four parts: (1) Pan-information road data collection. Data acquisition vehicles and other external sensors were used to collect multi-source data such as LiDAR system point cloud data, remote sensing images, oblique photogrammetric data, high-definition camera images, thermal infrared images, sound signal and electromagnetic signal. (2) Road static information extraction. Static information was basis for route planning and vehicle locating, which was obtained through the multi-source data mentioned above. The main road static information included lane lines, curbs, railings, road signs, road lamps, tunnels. (3) Road dynamic information extraction. Dynamic information was basis for real-time detecting surroundings and adjusting route of auto-vehicle, which was also obtained by extracting and marking the above collected data. The main road dynamic information included the distances between the vehicle and near objects, such as other cars, pedestrians and construction guardrails. Road dynamic information also included some ubiquitous information such as meteorological data, dynamic traffic conditions, POI data. (4) Fusion of dynamic and static information. Integrating road static information and road dynamic information can enrich road information, increase the accuracy of lane line, improve the updating efficiency of pan-information-based high precision navigation map,and provide map services for auto-driving vehiclesand its navigation. Compared with the existing map concepts and technologies, the map proposed in this paper has two characteristics: more detailed road information and more efficient data update, and both of the characteristics were based on our richer data sources, more diverse data collection methods and more efficient information extraction algorithms.