
Shaun Lung, Jihua Zhang, Kai Wang, Andrey A. Sukhorukov. Real-time monitoring of polarization state deviations with dielectric metasurfaces[J]. Advanced Photonics Nexus, 2023, 2(2): 026003
- Advanced Photonics Nexus
- Vol. 2, Issue 2, 026003 (2023)
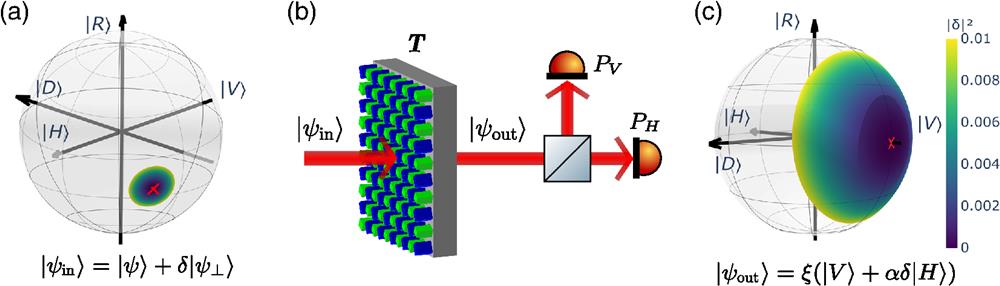
Fig. 1. Concept of polarization monitoring with a metasurface. (a) An arbitrarily chosen elliptical anchor polarization (red cross) on a Poincaré sphere and deviations
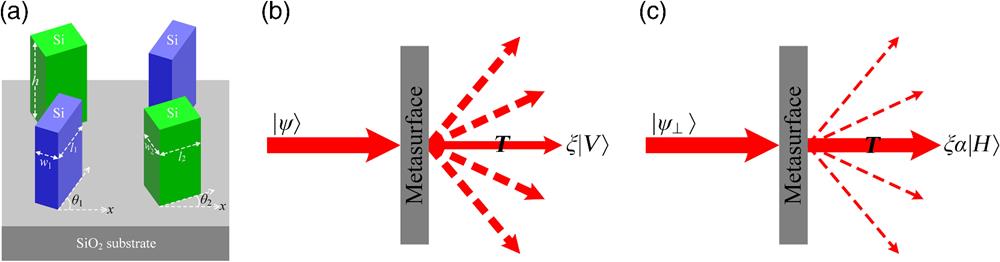
Fig. 2. Schematic representation of optimal metasurface for monitoring of polarization deviations. (a) One unit cell of the silicon metasurface for achieving the nonunitary transformation
Fig. 3. (a) Scanning electron microscope (SEM) image of metasurface fabricated to implement polarization sensing. The unit cell is indicated using the black, dashed box, with rotation from the horizontal indicated by Supplementary Material .
Fig. 4. Experimental measurement of power ratios for an elliptical anchor state of
Fig. 5. Experimental results for a near-circular anchor state of Fig. 4 .

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20