
Junjie Han, Kaiqing Luo, Jian Qiu, Dongmei Liu, Li Peng, Peng Han. Head Pose Estimation Method of Eye Tracker Based on Binocular Camera[J]. Laser & Optoelectronics Progress, 2021, 58(14): 1410022
- Laser & Optoelectronics Progress
- Vol. 58, Issue 14, 1410022 (2021)
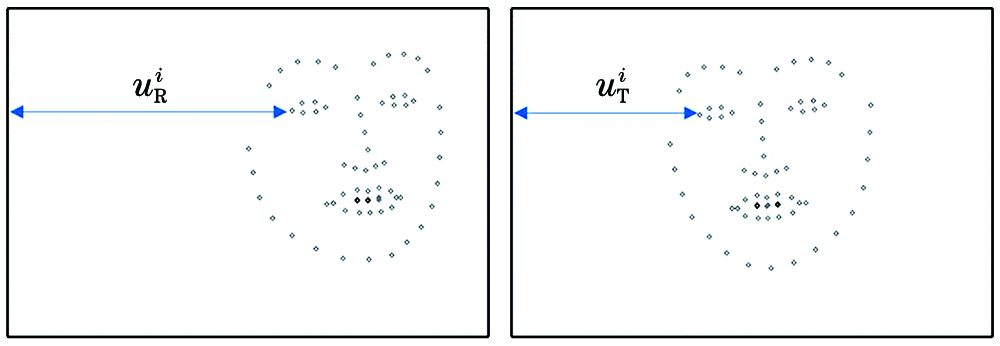
Fig. 1. Disparity of facial landmarks
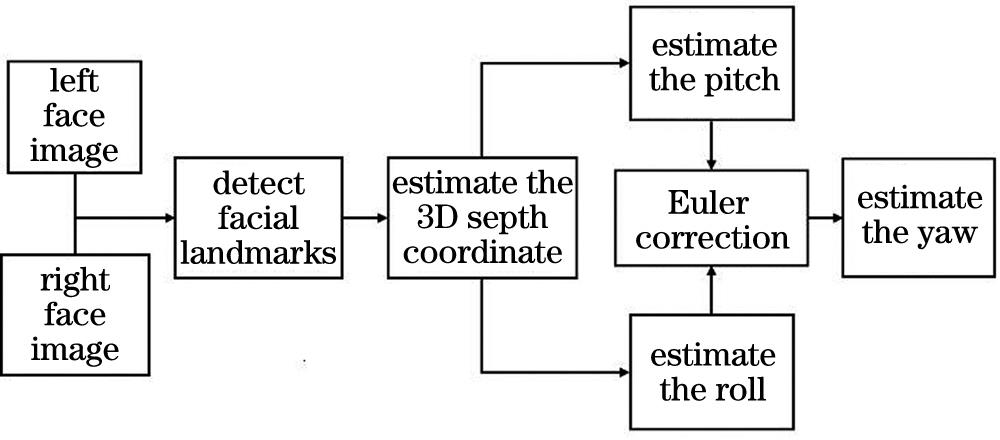
Fig. 2. Flow chart of 3D head pose estimation
Fig. 3. Facial intrinsic coordinate system
Fig. 4. Plan view of the yaw
Fig. 5. Plan view of the roll
Fig. 6. Plan view of the pitch
Fig. 7. Euler correction of the roll
Fig. 8. Euler correction of the yaw
Fig. 9. Experiment platform. (a) Experiment system; (b) 3D rotating optical instruments; (c) binocular cameras
Fig. 10. Images in the head pose dataset. (a) Pitch; (b) roll; (c) yaw
Fig. 11. Visualization of 3D facial landmarks
Fig. 12. Average absolute error of the roll
Fig. 13. Average absolute error of the pitch
Fig. 14. Mean absolute error of the yaw
|
Table 1. Absolute error of Euler angle measurement unit: (°)
|
Table 2. RMS of Euler angle measurement
|
Table 3. Absolute error of large-angle Euler angle measurement unit: (°)

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20