
Shanshan Zheng, Hao Wang, Shi Dong, Fei Wang, Guohai Situ. Incoherent imaging through highly nonstatic and optically thick turbid media based on neural network[J]. Photonics Research, 2021, 9(5): B220
- Photonics Research
- Vol. 9, Issue 5, B220 (2021)
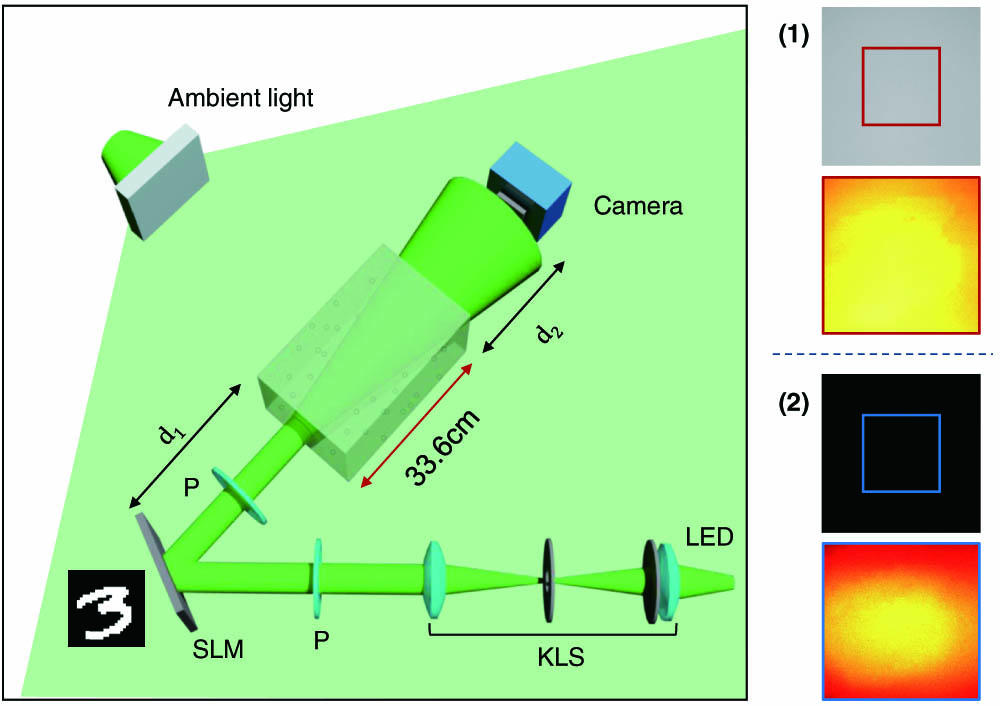
Fig. 1. Incoherent scattering imaging experimental system. (1) and (2) are the captured scattered patterns (the raw data and corresponding partial contrast stretched map) with optical thickness of 8 and 16, respectively. Note that these data are recorded in two sets of experiments: (1) capture data by the camera directly; (2) capture data with two additional apertures placed before the camera. KLS, Köhler lighting system; P, polarizer; ambient light, generated by a high-power LED through a diffuse slate (the distance between the slate and the tank side was around 3.5 cm); camera, working with an imaging lens (f = 250 mm d 1 ≃ 41 cm d 2 ≃ 15 cm
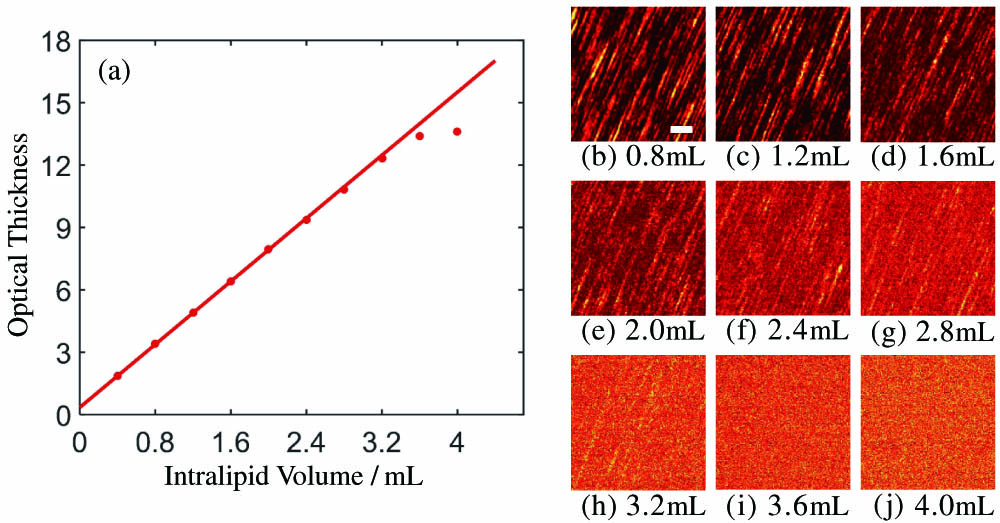
Fig. 2. Optical thickness of intralipid suspensions with respect to its density. (b)–(j) Speckle patterns corresponding to different densities. Scale bar: 200 μm.
Fig. 3. Multiple scattering trajectories in dynamic media. In this illustration, scatterers move from the black circle to the blue circle during time interval Δ τ r i ( i = 1 , … , n , … , N )
Fig. 4. Experiment setup. (a) Dual camera acquisition system. (b) Experimental site map of intralipid dilution: 11.47 L purified water (33.6 cm × 19.5 cm × 17.5 cm
Fig. 5. Decorrelation curves for different concentrations of intralipid dilutions. The data points and the error bars represent the mean value and the standard error of the correlation coefficient calculated from 10 image pairs. The solid lines in different colors are the fitting results, and the corresponding intralipid volume V I R -square) is used to describe the goodness of fit. Note that the horizontal axis is logarithmic scale.
Fig. 6. Experimental results. (a) Ground truths, and the reconstructed images in the case that the optical thickness equals (b) 8 and (c) 16, respectively.
Fig. 7. Robustness against the position change of the object/camera. Δ d
Fig. 8. Robustness against the scaling and rotation of the object/camera. β Δ θ C g Δ θ C g
Fig. 9. Reconstruction of nondigit objects with the neural network trained by using digits. (a) First and third rows are the ground truths; second and fourth are the corresponding reconstructed images. (b) Reconstructed USAF target and the highlight of some of its portions.
Fig. 10. Experimental results with natural scene object. (a) Scattered patterns. (b) Corresponding ground truth. (b) Reconstructed results.
Fig. 11. Proposed neural network architecture. (a) Digits in the format m − n m n

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20