
Jingtao Shao, Changqing Du, Bin Zou. Lidar Ground Segmentation Method Based on Point Cloud Cluster Combination Feature[J]. Laser & Optoelectronics Progress, 2021, 58(4): 0428001-1
- Laser & Optoelectronics Progress
- Vol. 58, Issue 4, 0428001-1 (2021)
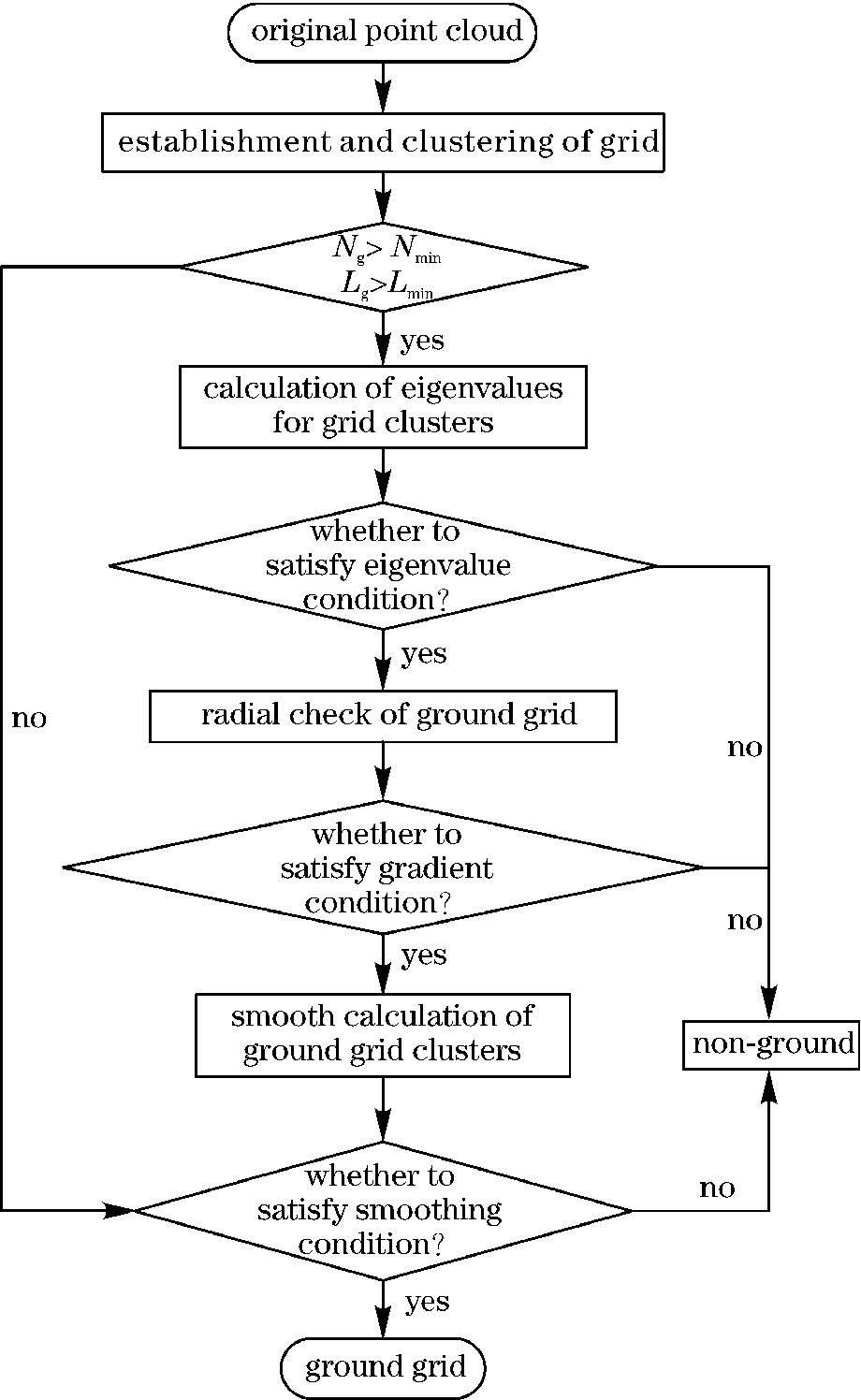
Fig. 1. Flowchart of proposed method
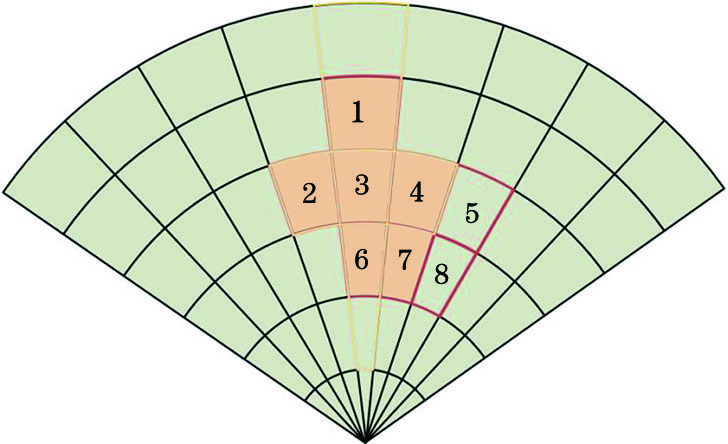
Fig. 2. Schematic of fan grid
Fig. 3. Schematic of eigenvalue analysis. (a) λmax>λmiddle≈λmin; (b) λmax≈λmiddle>λmin; (c) λmax≈λmiddle≈λmin
Fig. 4. Schematic of gradient inspection process in radial direction
Fig. 5. New start grid determination method
Fig. 6. Smoothing process
Fig. 7. Test results of simple rough road surface under different methods. (a) Ref. [13]; (b) Ref. [9]; (c) proposed method
Fig. 8. Test results of slope pavement under different methods. (a) Ref. [13]; (b) Ref. [16]; (c) proposed method
Fig. 9. The test results of multi-obstacle pavement under different methods. (a) Ref. [13]; (b) Ref. [16]; (c) proposed method
|
Table 1. Ground segmentation effect of each method in different scenes

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20