
Qingsong Liu, Xiaofang Xie, Xuanzhe Zhang, Yu Tian, Xiaojun Xu. Equivalent Multi-Camera Model of Focused Plenoptic Camera and Its Application in Structure from Motion[J]. Acta Optica Sinica, 2021, 41(3): 0315001
- Acta Optica Sinica
- Vol. 41, Issue 3, 0315001 (2021)
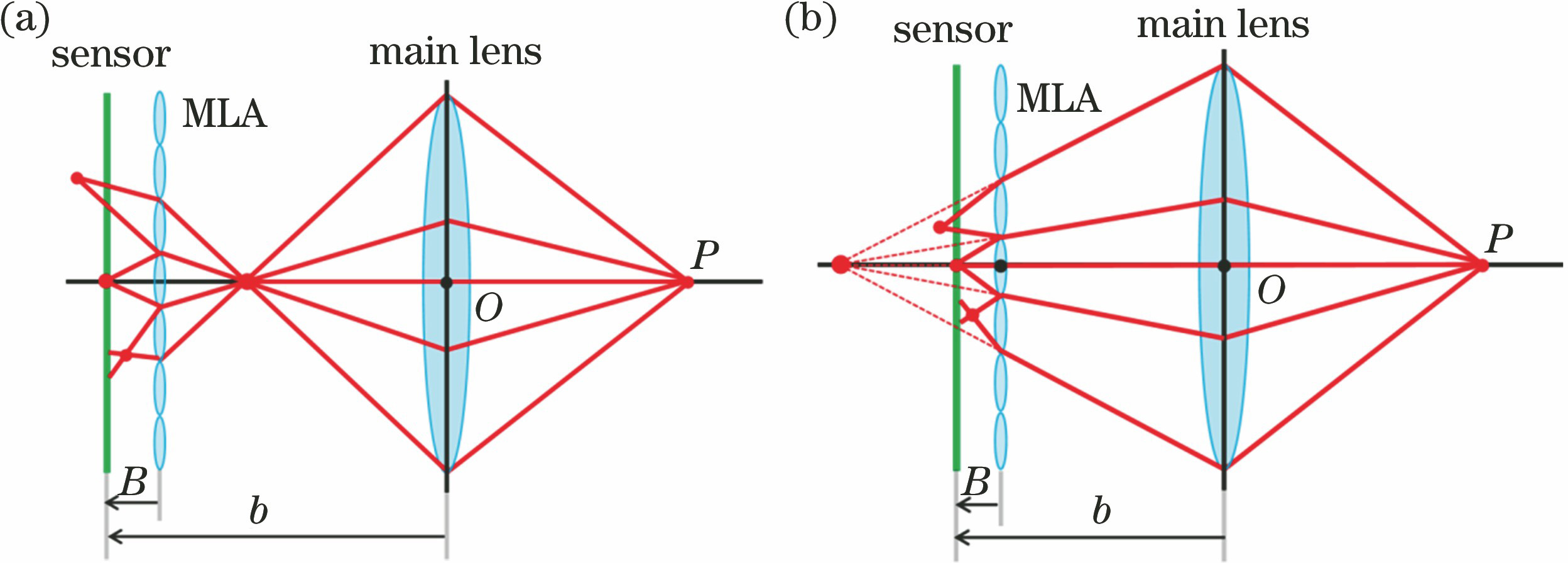
Fig. 1. Illustration of focused plenoptic camera with multi-focus. (a) Keplerian configuration; (b) Galilean configuration
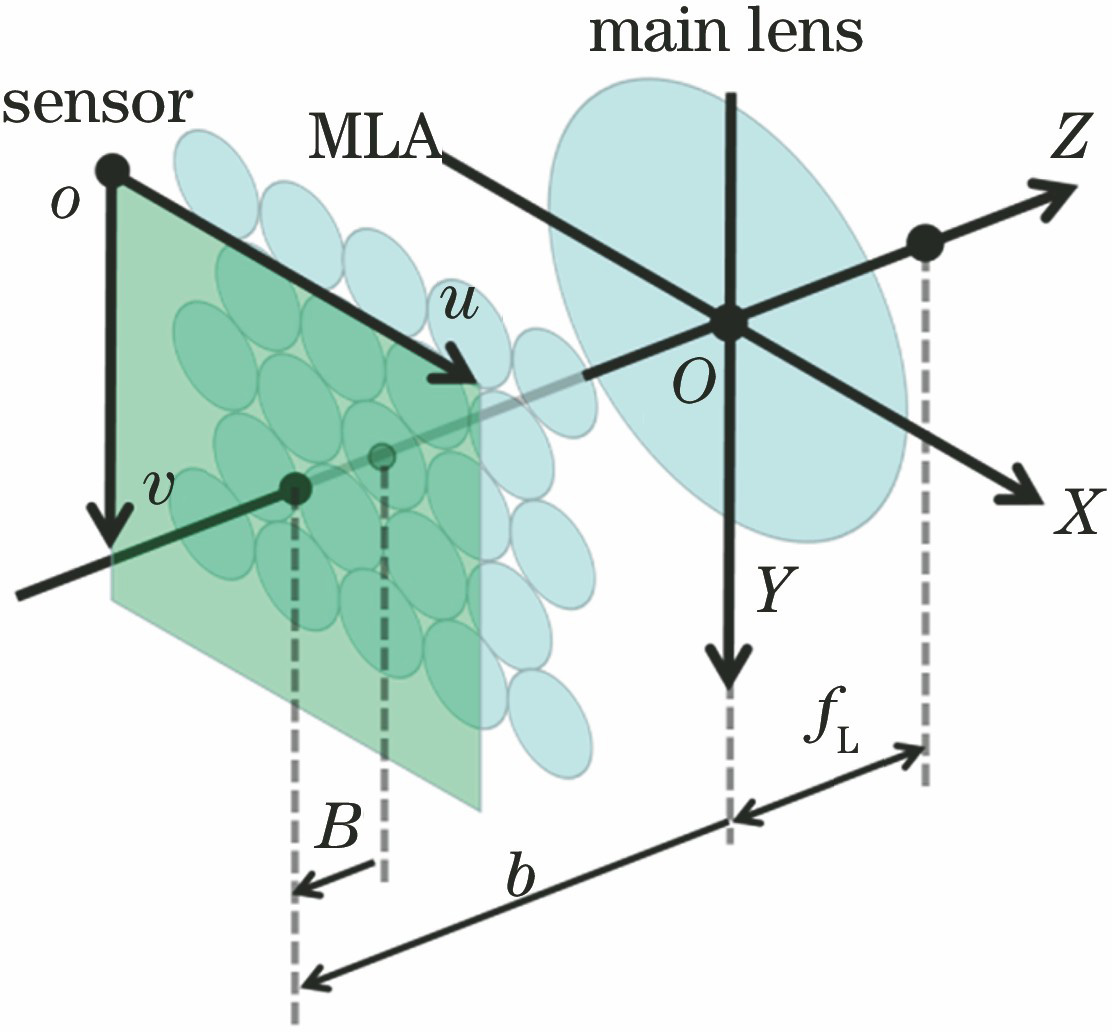
Fig. 2. Establishment of coordinate system for plenoptic camera
Fig. 3. Equivalent multi-camera model. (a) fL>|b-B|; (b) fL<|b-B|
Fig. 4. Establishment of coordinate system for sub-camera
Fig. 5. Relation between sub-camera image and micro-image
Fig. 6. Establishment of sub-camera image coordinate system
Fig. 7. Illustration of non-central camera
Fig. 8. Results of relative pose estimation. (a) Median position error; (b) median rotation error
Fig. 9. Results of absolute pose estimation. (a) Median position error; (b) median rotation error
Fig. 10. Results of triangulation
Fig. 11. Raw images captured by R29
Fig. 12. Illustration of detected SIFT features
Fig. 13. Scene reconstruction results. (a) Results without coordinate axis; (b) results with coordinate axis
|
Table 1. Parameters of focused plenoptic camera
|
Table 2. Intrinsic parameters of focused plenoptic camera
|
Table 3. Intrinsic parameters of R29 camera

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20