
Yanqiong Shi, Kefan Li, Rongsheng Lu, Xiyong Zhou. Kinematic Parameter Identification of Industrial Robot Based on Binocular Vision[J]. Laser & Optoelectronics Progress, 2023, 60(14): 1415002
- Laser & Optoelectronics Progress
- Vol. 60, Issue 14, 1415002 (2023)
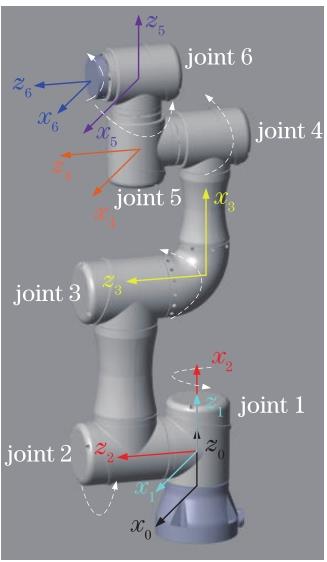
Fig. 1. 3D coordinate system relationship diagram of robotic arm

Fig. 2. Binocular vision recognition robot kinematic parameter system
Fig. 3. Pseudo-random sequence and Halton sequence comparison chart
Fig. 4. Flow chart of kinematic parameter identification by STAPSO
Fig. 5. Layout of the experimental device
Fig. 6. Measurement error diagrams of binocular vision system. (a) 70 mm error point set; (b) x, y axis 10 mm, 70 mm average error; (c) x-axis range error; (d) y-axis range error
Fig. 7. Spatial distribution of collection points
Fig. 8. Comparison chart of PSO algorithm iteration
Fig. 9. Comparison of identification results of each algorithm
|
Table 1. MDH model parameter table
|
Table 2. Parameter table of the identified MDH model
|
Table 3. Statistical analysis of distance error

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20