
Wenxiu Teng, Xiaorong Wen, Ni Wang, Huihui Shi. Individual Tree Crown Extraction in High Resolution Remote Sensing Image Based on Iterative H-minima Improved Watershed Algorithm[J]. Laser & Optoelectronics Progress, 2018, 55(12): 122802
- Laser & Optoelectronics Progress
- Vol. 55, Issue 12, 122802 (2018)
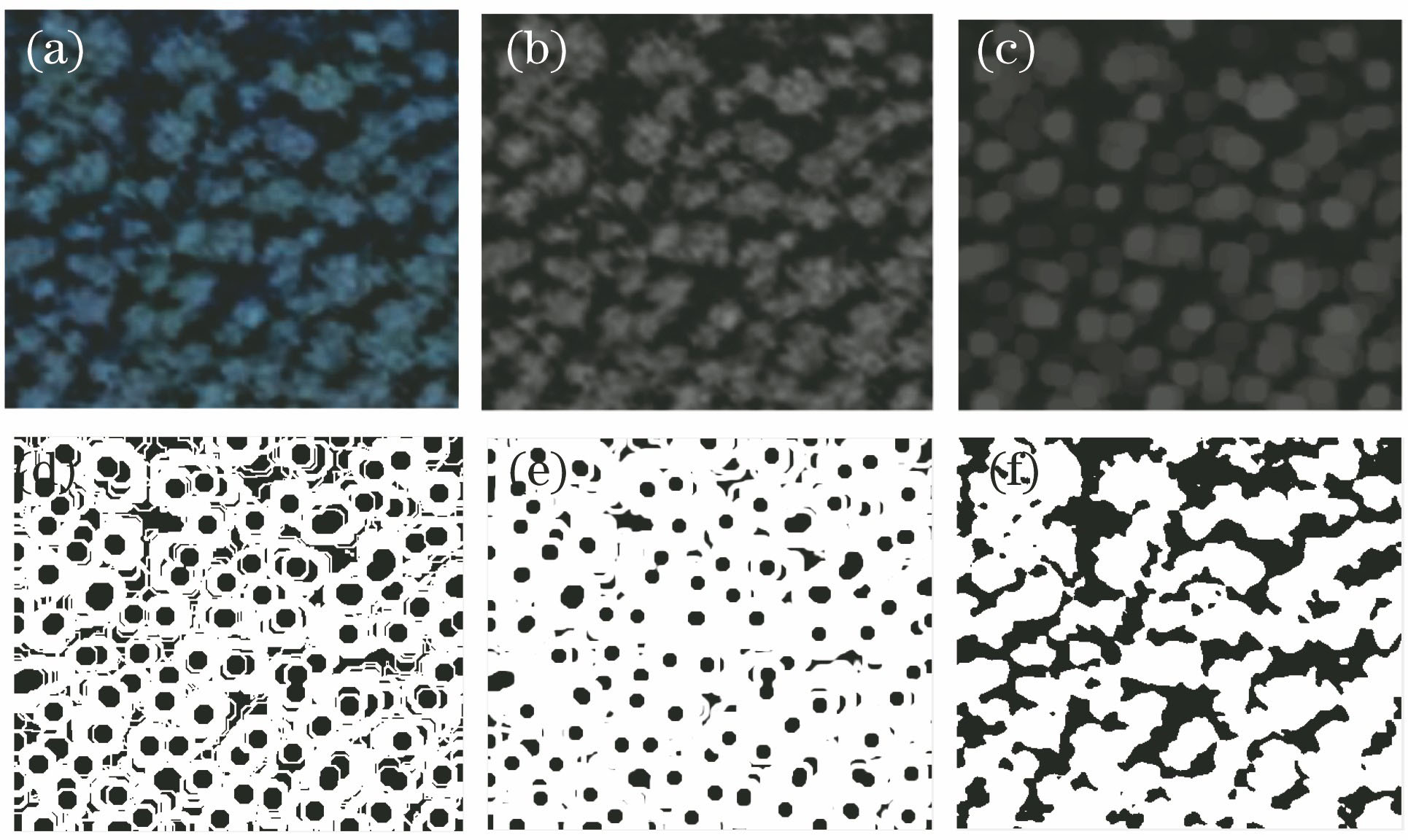
Fig. 1. Process of image preprocessing. (a) Original image; (b) gray image; (c) image after morphological open operation; (d) gradient image; (e) image after mean filter denoising; (f) binary image
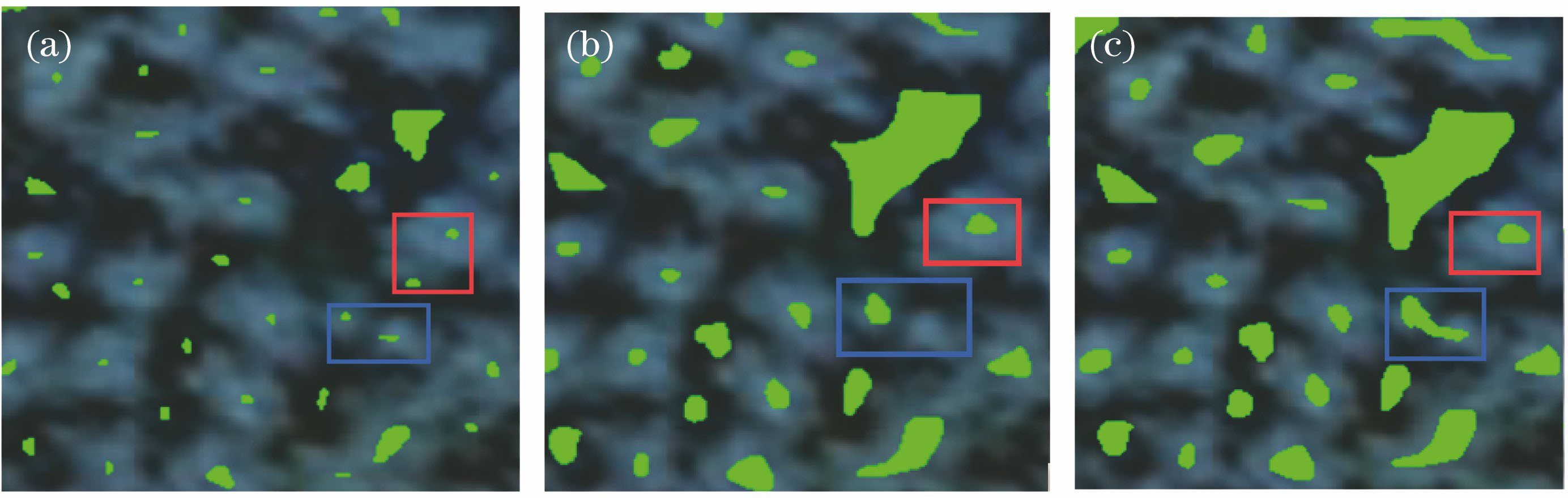
Fig. 2. Marker extraction results with different h values. (a) h=1; (b) h=2; (c) h=3
Fig. 3. Process of overlap markers detection. (a) Original image; (b) tree crown markers when h is 1; (c) tree crown markers when h is 2; (d) image with marker dilation; (e) filtered image; (f) marked image
Fig. 4. Images obtained with different h values. (a) h=1; (b) h=2; (c) h=3; (d) h=4; (e) h=5; (f) h=6
Fig. 5. Tree crown extraction. (a) Original image; (b) detection marker; (c) traditional algorithm; (d) proposed algorithm in this paper
Fig. 6. Symmetric growth principle
Fig. 7. Result of markers growth
Fig. 8. Individual tree crown extraction. (a) Remote sensing image of sample 1; (b) reference tree crown of sample 1; (c) extraction of sample 1 with marker-controlled watershed segmentation algorithm; (d) extraction of sample 1 with proposed algorithm in this paper; (e) remote sensing image of sample 2; (f) reference tree crown of sample 2; (g) extraction of sample 2 with marker-controlled watershed segmentation algorithm; (h) extraction of sample 2 with proposed algorithm in this paper
|
Table 1. Accuracy assessment of individual tree position
|
Table 2. Accuracy assessment of tree crown contour

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20