
Feng Tang, Nan Zhao. Quantum noise of a harmonic oscillator under classical feedback control[J]. Chinese Physics B, 2020, 29(9):
- Chinese Physics B
- Vol. 29, Issue 9, (2020)
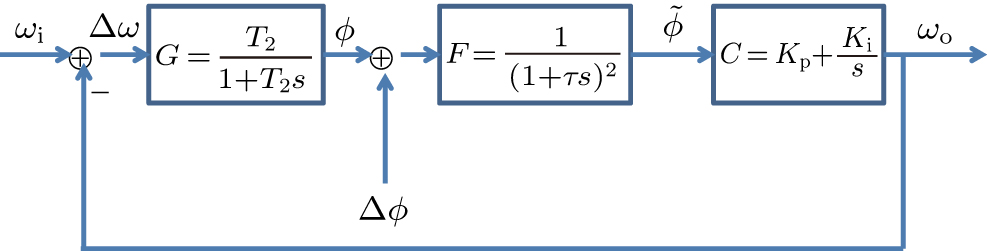
Fig. 1. The block diagram of the close-loop control of a quantum sensor system. The open-loop transfer function of the oscillator is denoted by G . A second order filter F with filter time constant τ is applied to suppress high frequency noise. A PI-controller C is used to adjust the output frequency ω o so as to trace the variation of the input frequency ω i. The control parameter K p represents the proportional term and K i stands for the integral term. The quantum phase white noise Δϕ will be a disturbance to the output of the PI-controller. Finally, the phase shift ϕ is the output of the sensor, followed by the high-frequency-noise-filtered phase shift ϕ ∼
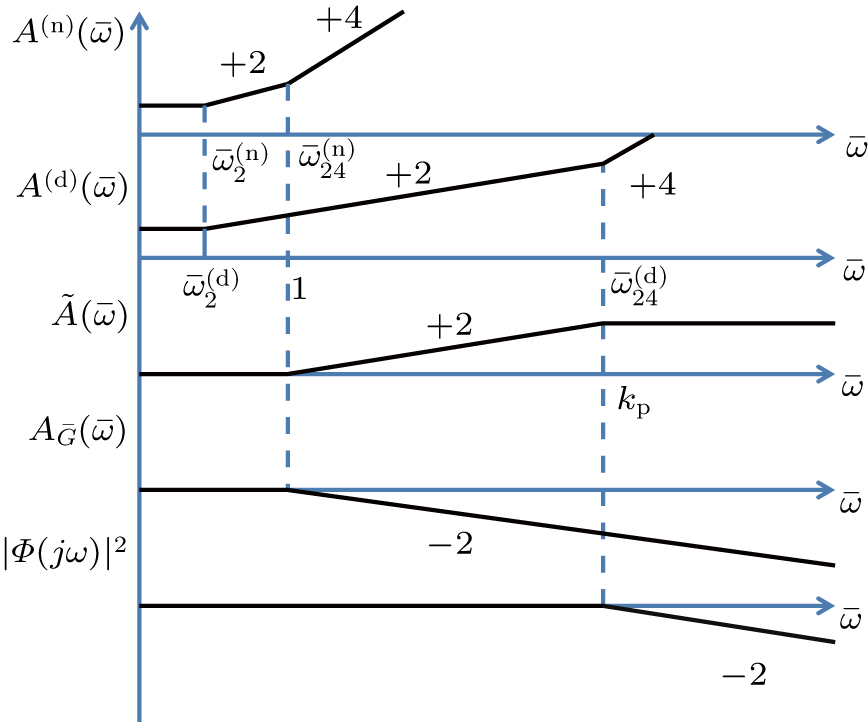
Fig. 2. Schematic diagram of bandwidth improvement by PID feedback. These curves are depicted in the log–log coordinates, where A ( n ) ( ω ¯ ) A ( d ) ( ω ¯ ) A ∼ ( ω ¯ ) ω ¯ 2 ω ¯ 4 1 / ω ¯ 2
Fig. 3. Demonstrations of the resonant and non-resonant behaviors of the close-loop frequency responses A close(ω ). The black curve represent the regime k i ≪ k p, while the red curve present resonant behavior with k i > k i c k p = 100 and k i = (1 + k p)2.
Fig. 4. Comparisons of frequency responses with filter F present or not. The black curve represents the frequency response of the open-loop system G . The pink and green curves describe the close-loop frequency responses of Φ 1(s ) = CGF /(1 + CGF ) and Φ 2(s ) = CG /(1 + CG ) when the filter F is present or not, respectively. The blue and red curves correspond to the frequency responses of A 1(s ) = CF /(1 + CGF ) and A 2(s ) = A (s ), respectively. The parameters used in this graph are T 2 = 10 s, τ = 10−4 s, k p = 1000 and k i = 100.
Fig. 5. (a) The block diagram of the noise transfer. The noise Δϕ (s ), which is here the Laplace transformation of Δϕ (t ), causes a output frequency fluctuation in the PI controller, as represented by ω n(s ) in the above diagram. (b) The power spectral density S n 1 / 2 ( ω ) ω n(t ). The red curve is depicted with k p = 2000, which is twice over that of the black one. Other parameters used are k i = 100, T 2 = 10 s, τ /T 2 = 10−5, and T 2g = 103.

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20