Author Affiliations
School of Mathematics and Physics, China University of Geosciences (Wuhan), Wuhan 430074, Hubei , Chinashow less
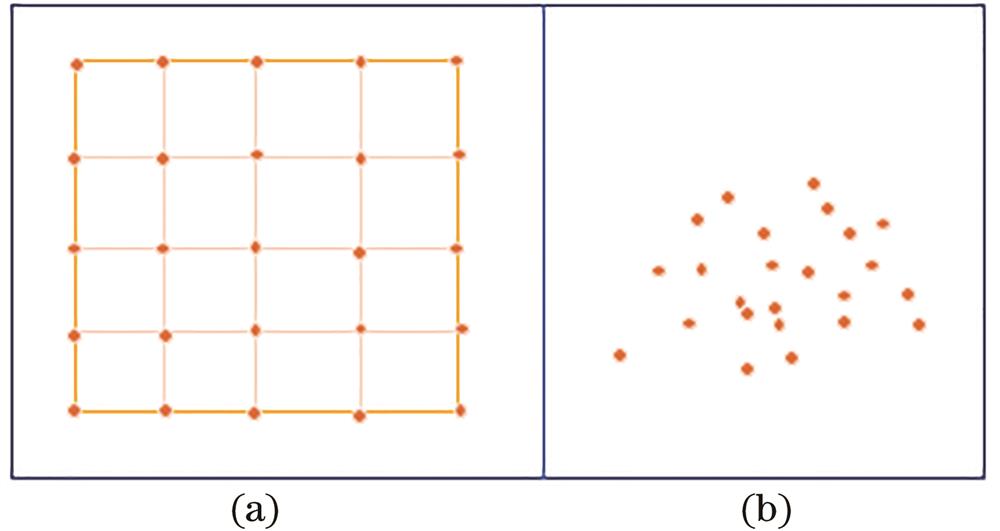
Fig. 1. Comparison schematic of regular 2D image and point cloud. (a) Image grid; (b) point cloud
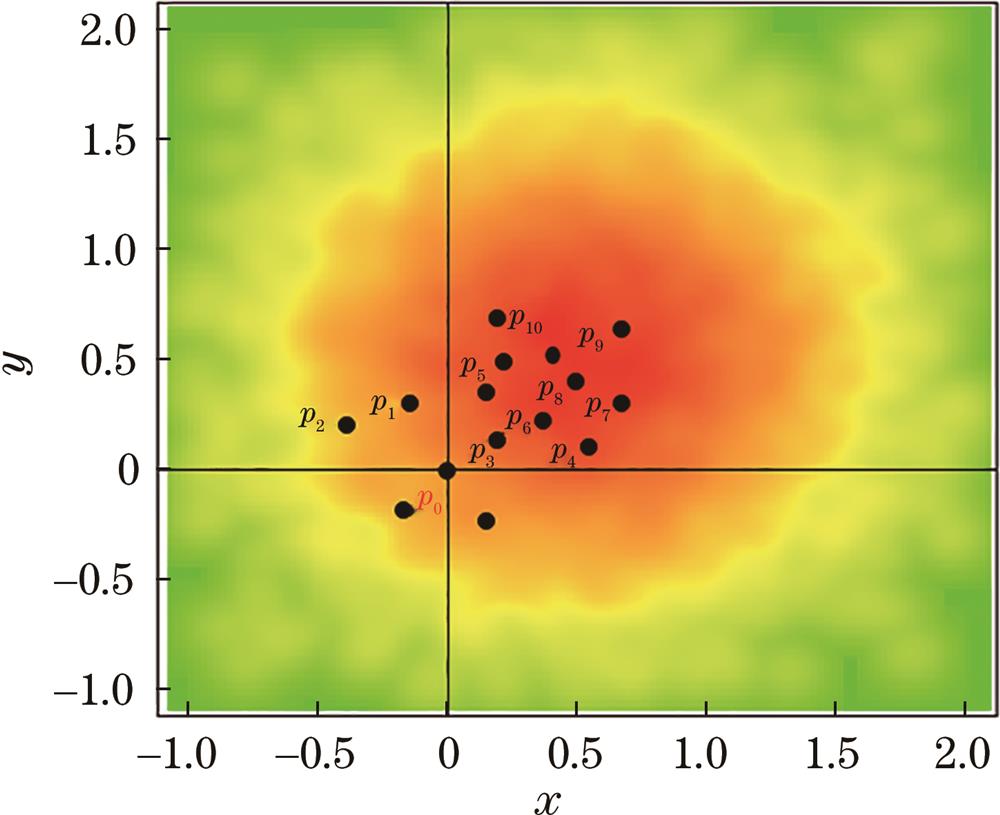
Fig. 2. Schematic of point cloud in local area
Fig. 3. U-Net(PointConv) schematic of semantic segmentation of point cloud
Fig. 4. Schematic of attention mechanism module structure
Fig. 5. Point cloud convolutional network based on attention mechanism (PCNNAM)
Fig. 6. GML_DataSetA. (a) Schematic of training set; (b) schematic of test set
Fig. 7. Classification results of test set under different networks and the real distribution diagram of GML_DataSetA data set
| Data set | Ground | Building | Tree | Low vegetation | All |
|---|
| Train set | 557142 | 98244 | 381677 | 35093 | 1072156 | | Test set | 439989 | 19592 | 531852 | 7758 | 999191 |
|
Table 1. All kinds of point cloud distribution in GML_DataSetA training set and test set
| Class | Ground | Building | Tree | Low vegetation |
|---|
| Ground | 428997 | 2228 | 6862 | 1900 | | Building | 4499 | 11748 | 2540 | 805 | | Tree | 26975 | 5210 | 497374 | 2293 | | Low vegetation | 2539 | 591 | 3283 | 1345 | | Precision | 0.975 | 0.60 | 0.935 | 0.173 | | Recall | 0.927 | 0.594 | 0.975 | 0.212 | | F1 score | 0.950 | 0.597 | 0.955 | 0.191 |
|
Table 2. Confusion matrix of classification results in test set obtained by PCNNAM
| Parameter | None | =1.1 | =1.2 | =1.3 | =1.4 | =1.5 |
|---|
| Overall accuracy | 0.874 | 0.860 | 0.940 | 0.912 | 0.911 | 0.788 | | Overall F1 score | 0.487 | 0.487 | 0.673 | 0.559 | 0.597 | 0.468 |
|
Table 3. Classification results under different coefficients for class balance
| Method | Density weighted | Attentional mechanism | F1 score | OA | Average F1 score |
|---|
| Ground | Building | Tree | Low vegetation |
|---|
| PointNet++ | × | × | 0.832 | 0 | 0.838 | 0 | 0.823 | 0.417 | | U-Net(PointConv) | √ | × | 0.937 | 0.379 | 0.908 | 0.122 | 0.895 | 0.587 | | PCNNAM | √ | √ | 0.950 | 0.597 | 0.955 | 0.191 | 0.940 | 0.673 |
|
Table 4. Classification results of the GML_DataSetA test set under different networks
| Category | Train set | Test set |
|---|
| All | 753876 | 411722 | | Power line | 546 | 600 | | Low vegetation | 180850 | 98690 | | Impermeable surface | 193723 | 101986 | | Car | 4614 | 3708 | | Fence | 12070 | 742 | | Roof | 152045 | 109048 | | Building surface | 27250 | 11224 | | Shrub | 47605 | 24818 | | Tree | 135173 | 54226 |
|
Table 5. Distribution of various point clouds in the ISPRS Vaihingen 3D semantic marker benchmark data set
| Category | Power line | Low vegetation | Impermeable surface | Car | Fence | Roof | Building surface | Shrub | Tree |
|---|
| Power line | 328 | 1 | 0 | 0 | 0 | 76 | 3 | 2 | 190 | | Low vegetation | 0 | 77586 | 9983 | 154 | 528 | 1137 | 407 | 6684 | 2211 | | Impermeable surface | 0 | 7159 | 94183 | 36 | 9 | 223 | 82 | 233 | 61 | | Car | 0 | 121 | 113 | 2439 | 302 | 94 | 4 | 625 | 10 | | Fence | 0 | 729 | 107 | 46 | 1704 | 289 | 10 | 3759 | 778 | | Roof | 124 | 1416 | 126 | 3 | 123 | 95357 | 683 | 1450 | 9765 | | Building surface | 14 | 642 | 75 | 41 | 50 | 1826 | 4611 | 1596 | 2369 | | Shrub | 0 | 3537 | 214 | 161 | 1073 | 1513 | 344 | 11364 | 6612 | | Tree | 3 | 844 | 55 | 44 | 257 | 740 | 259 | 5388 | 46635 | | Precision | 0.699 | 0.843 | 0.898 | 0.834 | 0.421 | 0.941 | 0.720 | 0.365 | 0.680 | | Recall | 0.547 | 0.786 | 0.923 | 0.658 | 0.230 | 0.874 | 0.411 | 0.458 | 0.860 | | F1 score | 0.614 | 0.834 | 0.911 | 0.736 | 0.297 | 0.907 | 0.523 | 0.406 | 0.759 |
|
Table 6. Confusion matrix of classification results for ISPRS Vaihingen 3D semantic marker benchmark data set obtained by PCNNAM
| Method | F1 score | OA | Average F1 score |
|---|
| Power line | Low vegetation | Impermeable surface | Car | Fence | Roof | Building surface | Shrub | Tree |
|---|
| UM | 0.461 | 0.790 | 0.891 | 0.477 | 0.052 | 0.920 | 0.527 | 0.409 | 0.779 | 0.808 | 0.590 | | WhuY3 | 0.371 | 0.814 | 0.901 | 0.634 | 0.239 | 0.934 | 0.475 | 0.399 | 0.780 | 0.823 | 0.616 | | LUH | 0.596 | 0.775 | 0.911 | 0.731 | 0.340 | 0.942 | 0.563 | 0.466 | 0.831 | 0.816 | 0.684 | | BIJW | 0.138 | 0.785 | 0.905 | 0.564 | 0.363 | 0.922 | 0.532 | 0.433 | 0.784 | 0.815 | 0.603 | | RIT_1 | 0.375 | 0.779 | 0.915 | 0.734 | 0.180 | 0.940 | 0.493 | 0.459 | 0.825 | 0.816 | 0.633 | | NANJ | 0.620 | 0.888 | 0.912 | 0.667 | 0.407 | 0.936 | 0.426 | 0.559 | 0.826 | 0.852 | 0.693 | | WhuY4 | 0.425 | 0.827 | 0.914 | 0.747 | 0.537 | 0.943 | 0.531 | 0.479 | 0.828 | 0.849 | 0.692 | | U-Net (PointConv) | 0.614 | 0.834 | 0.911 | 0.736 | 0.297 | 0.907 | 0.523 | 0.406 | 0.759 | 0.812 | 0.663 | | Propoosed method | 0.589 | 0.809 | 0.902 | 0.740 | 0.319 | 0.911 | 0.587 | 0.435 | 0.768 | 0.8124 | 0.673 |
|
Table 7. Comparison of the results of PCNNAM and other experiments published by the ISPRS Vaihingen 3D semantic markup competition