
Xin Li, Site Mo, Hua Huang, Shiji Yang. Multi-source point cloud registration method based on automatically calculating overlap[J]. Infrared and Laser Engineering, 2021, 50(12): 20210088
- Infrared and Laser Engineering
- Vol. 50, Issue 12, 20210088 (2021)
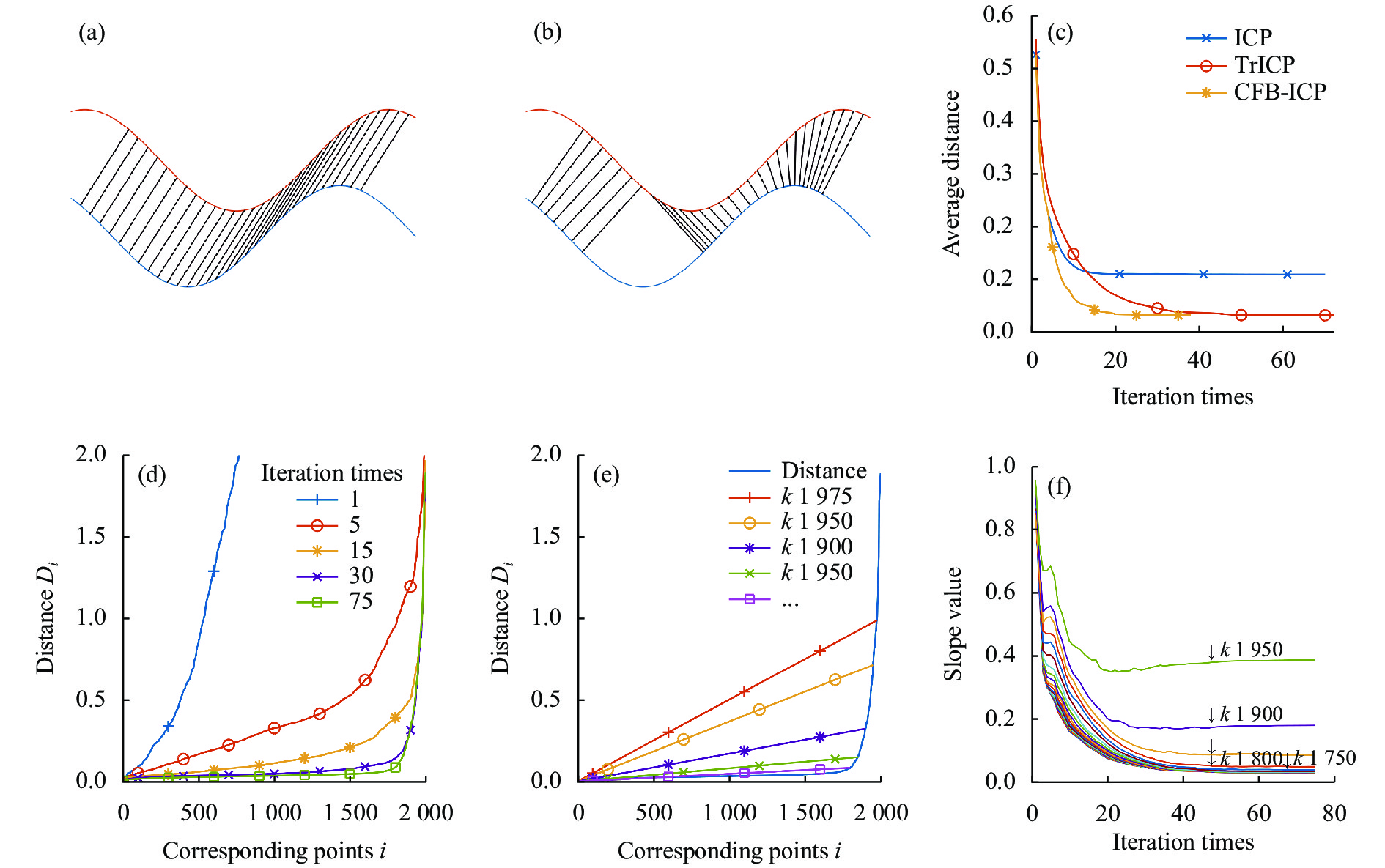
Fig. 1. (a) Ideal corresponding points; (b) Nearest distance corresponding points; (c) Convergence curves of algorithms; (d) Distance curves of corresponding points; (e) Slopes between points on the distance curve and the original point; (f) Slope curves of different points

Fig. 2. Registration results for Bunny
Fig. 3. Registration results for Hippo
Fig. 4. Registration results for TBunny
Fig. 5. Registration results after adding noise to Bunny
Fig. 6. Point cloud of Maoxian landslide. (a) Image reconstruction point cloud; (b) Laser scanning point cloud
Fig. 7. Registration results of Maoxian landslide point cloud
|
Table 1. MSE and time consumption
|
Table 2. MSE and time consumption after adding noise to Bunny
|
Table 3. Results comparison of registration for Maoxian landslide

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20