
Qingpeng Zhang, Yu Cao. Research on Three-Dimensional Reconstruction Algorithm of Weak Textured Objects in Indoor Scenes[J]. Laser & Optoelectronics Progress, 2021, 58(8): 0810017
- Laser & Optoelectronics Progress
- Vol. 58, Issue 8, 0810017 (2021)

Fig. 1. Image to be matched taken by mobile phone
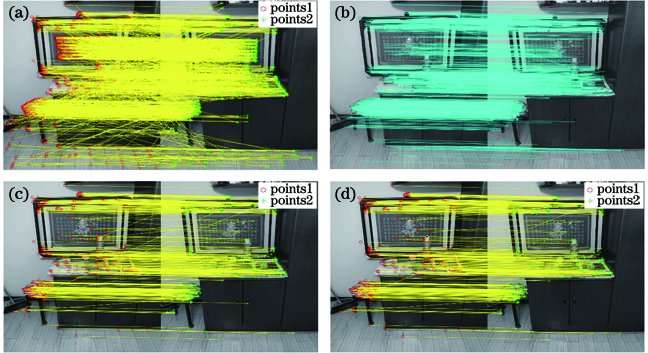
Fig. 2. Matching results of different algorithms. (a) Harris algorithm; (b) SIFT algorithm; (c) Harris-SIFT algorithm; (d) our algorithm
Fig. 3. Experimental images at different l. (a) l=3; (b) l=2; (c) l=1
Fig. 4. Structure of the ResNet50
Fig. 5. Some experimental images
Fig. 6. Sparse three-dimensional point cloud. (a) SFM algorithm; (b) improved SFM algorithm
Fig. 7. Dense point cloud of the object. (a) MVS algorithm; (b) our algorithm
Fig. 8. Three-dimensional reconstruction results of the Poisson surface. (a) Original algorithm; (b) improved algorithm
|
Table 1. Accuracies and running time of 4 matching algorithms
|
Table 2. Image parameters at different l
|
Table 3. Errors of different algorithms
|
Table 4. Three-dimensional reconstruction results of different algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20