
Zhaodong Chen, Rongwei Fan, Guangchao Ye, Tong Luo, Jiayu Guan, Zhigang Zhou, Deying Chen. Depth resolution improvement of streak tube imaging lidar system using three laser beams[J]. Chinese Optics Letters, 2018, 16(4): 041101
- Chinese Optics Letters
- Vol. 16, Issue 4, 041101 (2018)
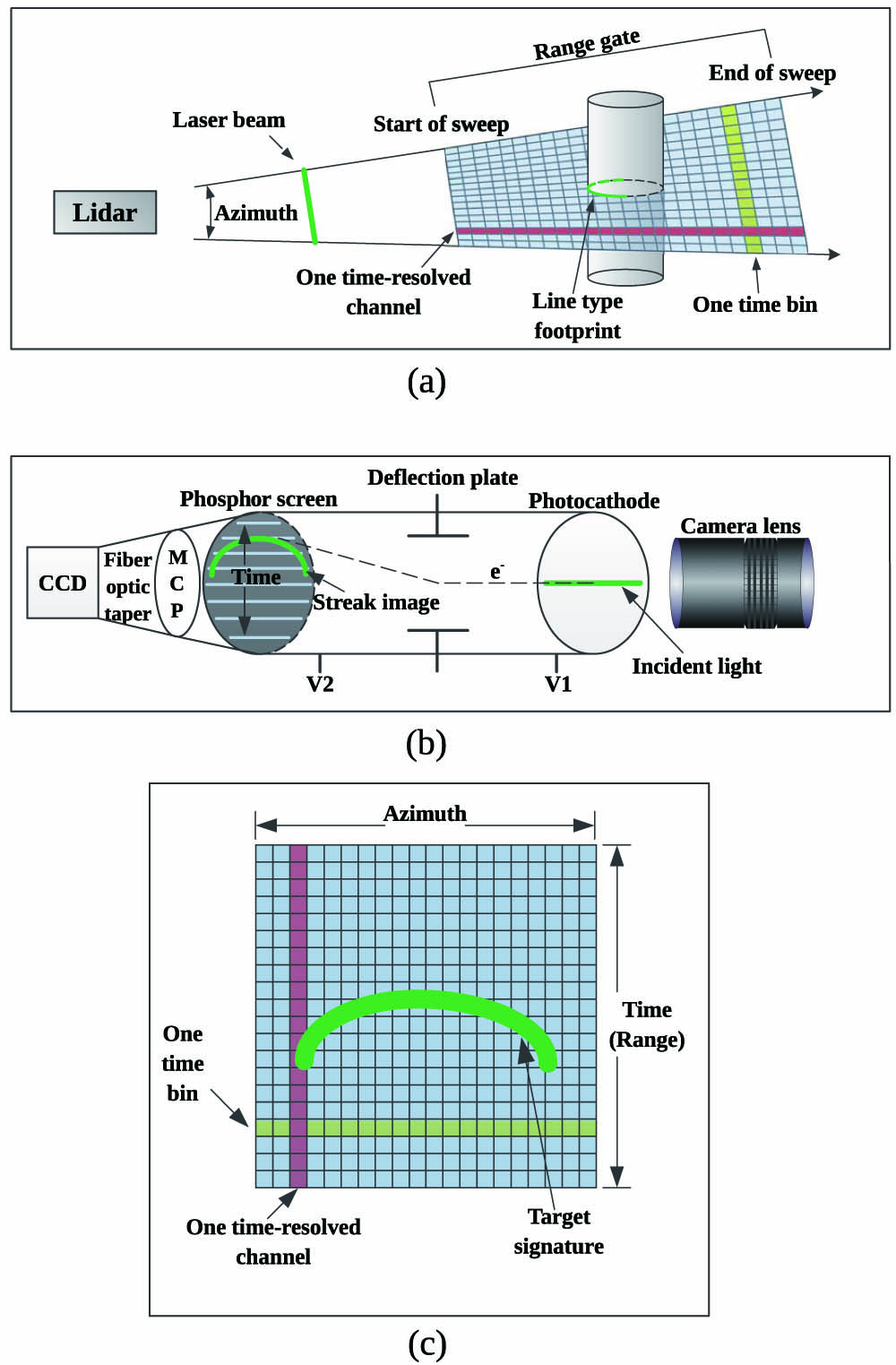
Fig. 1. Schematic of the STIL system. (a) Schematic of the data collection process. (b) The work principle of the streak array detector. (c) The streak image on the CCD.
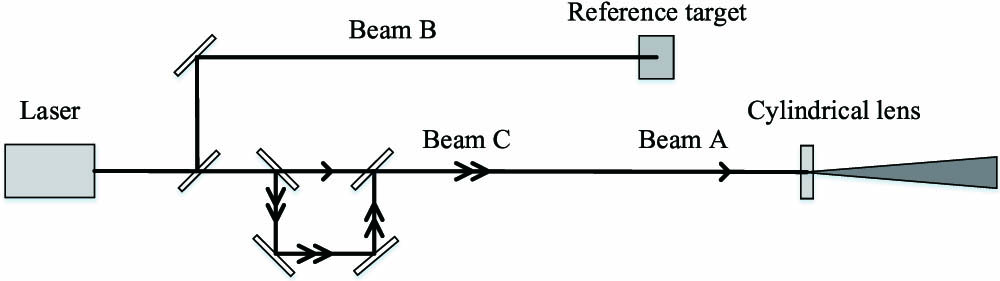
Fig. 2. Optical emission part of the three-laser-beam STIL system.
Fig. 3. Streak image of a simple plane.
Fig. 4. Error between the calculated value and theoretical value.
Fig. 5. Distance error with the theoretical distance.
Fig. 6. (a) Schematic of the three-laser-beam STIL system. (b) The streak signal of Beam A, Beam B, and Beam C on the CCD.
Fig. 7. (a) Photograph of the model. (b) Size of the base. The unit is millimeters. (c) Heights of “H”, “I”, “T”, and “!”. They are 2, 5, 10, and 20 mm, respectively.
Fig. 8. Results of the 3D imaging experiment. Different colors are used to represent distances. (a) The image obtained using only Beam A, (c) the image obtained using Beam A and Beam B, and (e) the image obtained using Beam A, Beam B, and Beam C. (b), (d), and (f) are the cutaway drawings of (a), (c), and (e) near the blue line separately.
|
Table 1. Parameters of the STIL System

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20