
Wenyue Li, Di He, Shuang Zhao, Chang Liu, Zhehai Zhou. RGB-D Data Stitching Based on Spatial Information Clustering[J]. Laser & Optoelectronics Progress, 2022, 59(10): 1011004
- Laser & Optoelectronics Progress
- Vol. 59, Issue 10, 1011004 (2022)
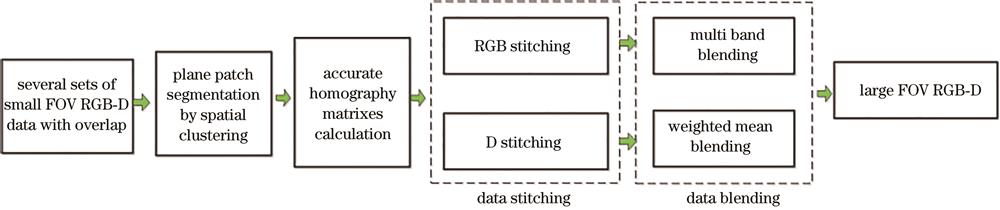
Fig. 1. Flow chart of RGB-D data stitching
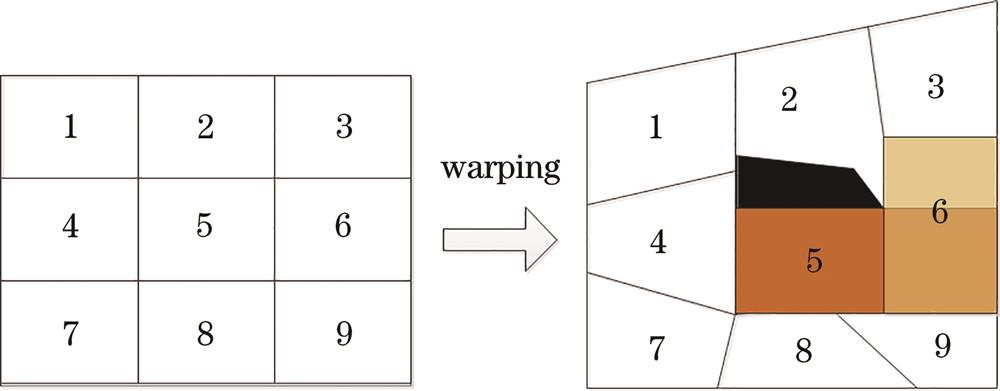
Fig. 2. Super-pixel warping
Fig. 3. Schematic of overlap interpolation
Fig. 4. Schematic of black hole interpolation
Fig. 5. Small FOV RGB-D data acquired under four viewpoints. (a) The first view RGB image; (b) the first view depth map; (c) the second view RGB image; (d) the second view depth map; (e) the third view RGB image; (f) the third view depth map; (g) the fourth view RGB image; (h) the fourth view depth map
Fig. 6. Large FOV RGB image
Fig. 7. Spatial information clustering results of RGB-D data in RGB images and depth images of the first view and the fourth view. (a) Result of the first view RGB image segmentation; (b) result of the first view depth image segmentation; (c) result of the fourth view RGB image segmentation; (d) result of the fourth view depth image segmentation
Fig. 8. Depth map segmentation results with different number of sub-blocks. (a) 20 blocks; (b) 100 blocks
Fig. 9. Depth map segmentation result with
Fig. 10. Depth map segmentation results with different
Fig. 11. Comparison of overlap and black hole interpolations. (a) Overlap and black hole after direct coordinate transformation; (b) result obtained by only overlap interpolation; (c) result obtained by overlap and black hole interpolations
Fig. 12. Results of RGB-D data stitching based on spatial information clustering. (a) Result of RGB image stitching; (b) result of depth image stitching
Fig. 13. Result of RGB stitching based on global homography transformation
Fig. 14. Results of image stitching with different number of grids. (a) 49 grids; (b) 1600 grids
|
Table 1. Quantitative evaluation of different methods

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20