
Weiqing Xu, Xijiang Chen, Guang Zhang, Qiaoqiao Yuan. Method for Extraction of Feature Lines of Three-Dimensional Laser Point Cloud Based on Gaussian Map[J]. Laser & Optoelectronics Progress, 2019, 56(9): 091403
- Laser & Optoelectronics Progress
- Vol. 56, Issue 9, 091403 (2019)
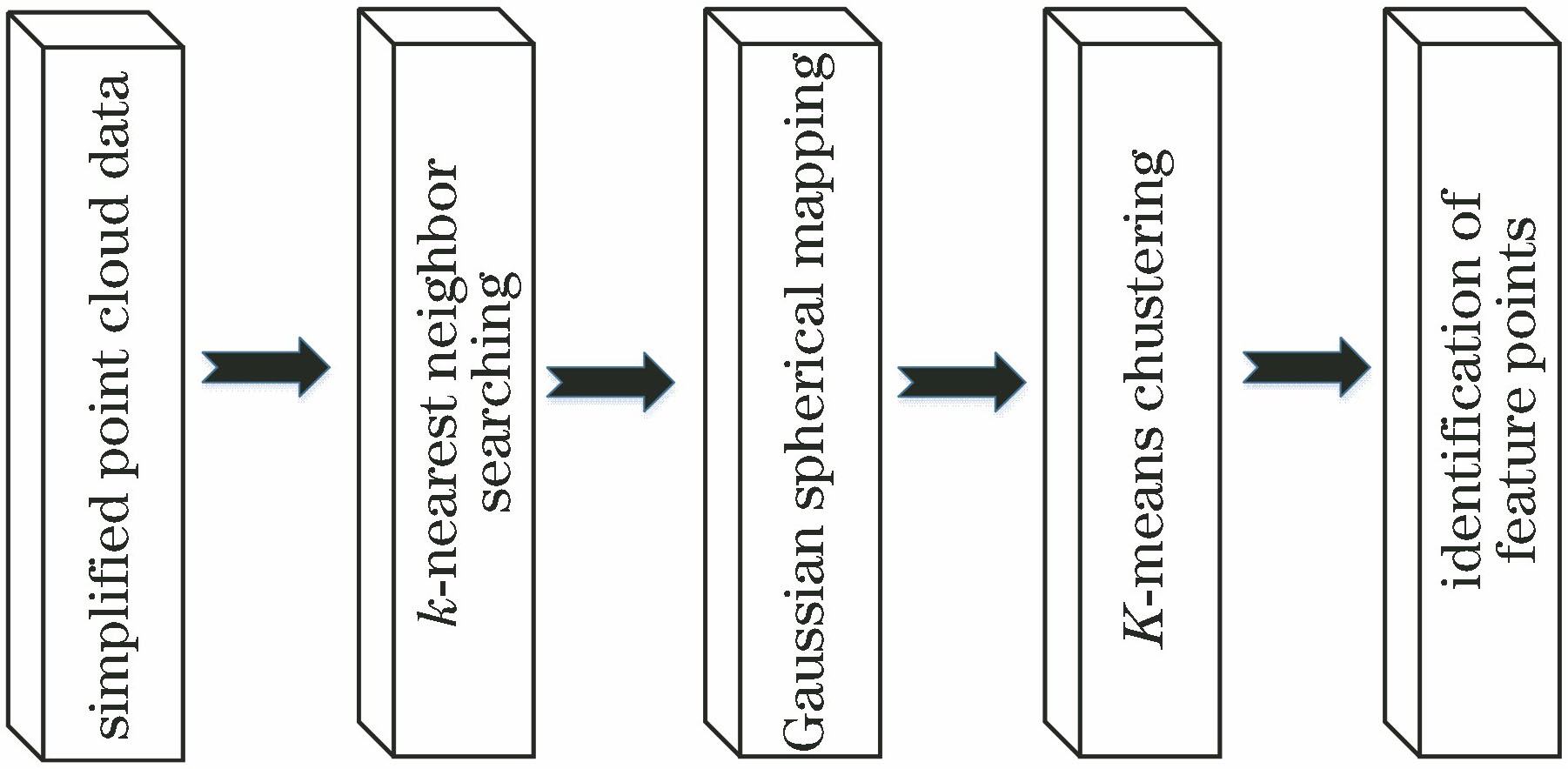
Fig. 1. Flow chart of algorithm
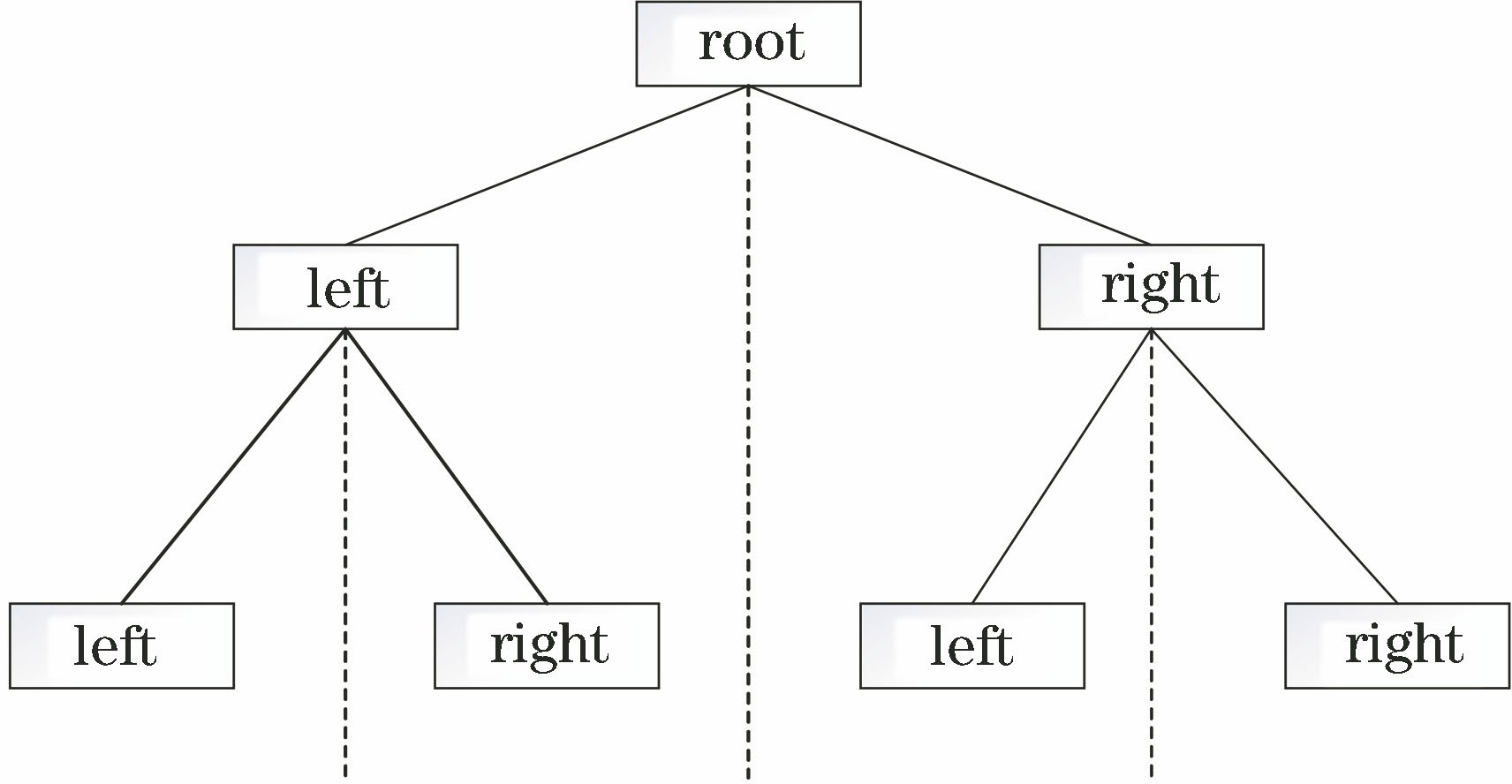
Fig. 2. Recursive process of Kd-tree
Fig. 3. Gauss map of surface ∑
Fig. 4. Neighborhood normal vector projection of certain target point
Fig. 5. Distribution law of Guassian map points. (a) Point clustering; (b) linear clustering; (c) surface clustering
Fig. 6. Extraction effect comparison of feature lines of regular point clouds by different algorithms. (a) Simplified point cloud; (b) proposed algorithm; (c) method in Ref. [9]; (d) method in Ref. [10]
Fig. 7. Extraction effect comparison of feature lines of irregular point clouds by different algorithms. (a) Simplified point cloud; (b) proposed algorithm; (c) method in Ref. [9]; (d) method in Ref. [10]
|
Table 1. Feature point extraction and running time of feature points of sculpture model in Fig. 7

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20