
Zonghua Zhang, Sen Wang, Yuying Wang, Ang Zhang, Zhaozong Meng, Yanjun Xiao, Nan Gao. Method for Extracting the Center of Circular Coded Target Based on Radial Straight Line Fitting of Circular Coding[J]. Laser & Optoelectronics Progress, 2020, 57(7): 071203
- Laser & Optoelectronics Progress
- Vol. 57, Issue 7, 071203 (2020)
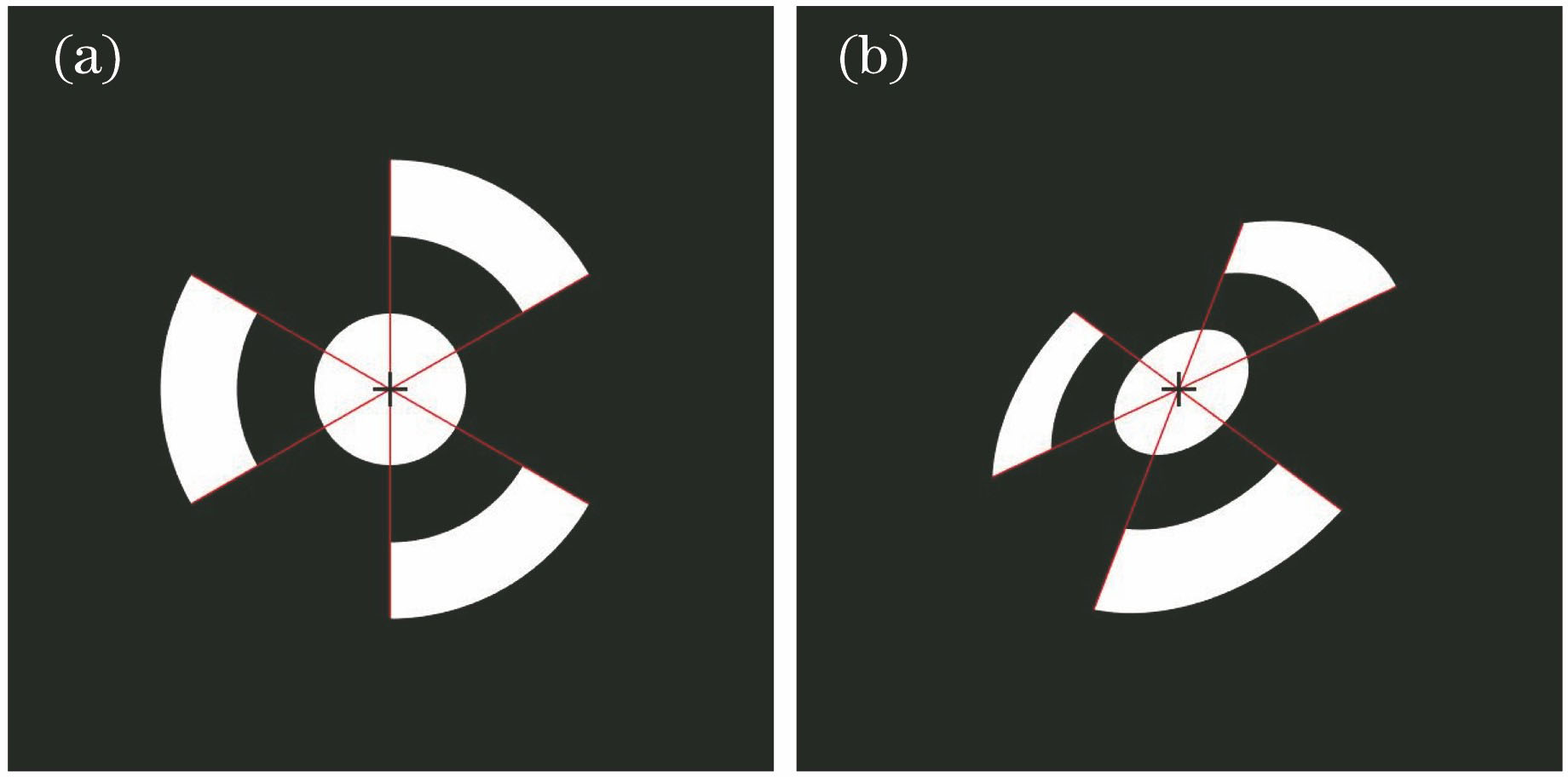
Fig. 1. Schneider coding mark before and after projection transformation. (a) Marked point of object plane; (b) marked point of image plane
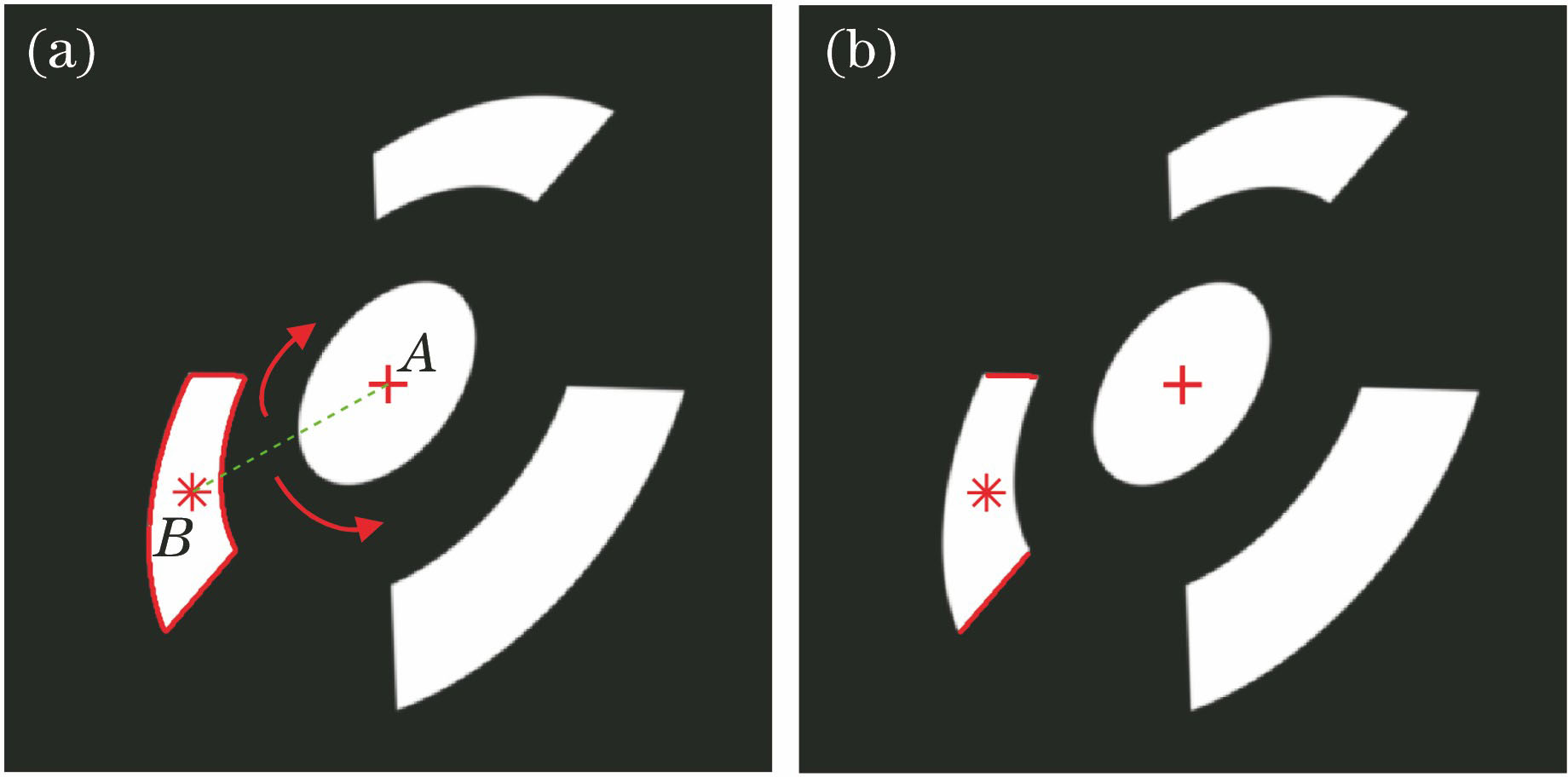
Fig. 2. Principle diagram of line edge segmentation. (a) Principle of segmentation; (b) result of segmentation
Fig. 3. Simulated straight line edge. (a) Simulated line image; (b) local enlarged image
Fig. 4. Comparison of center extraction methods for the simulation image. (a) Simulation image; (b) local enlarged image
Fig. 5. Effect of radius ratio on accuracy of extraction center
Fig. 6. Effect of the number of code segments on the accuracy of the extraction center
Fig. 7. Effect of Gaussian noise standard deviation on the accuracy of extraction center
Fig. 8. Schematic diagram of object plane rotation around y axis
Fig. 9. Effect of rotation angle change on center extraction error
Fig. 10. Effect of radius proportional change on center extraction error
Fig. 11. Comparison of center extraction on test target. (a) Test target image; (b) comparison of center extraction
Fig. 12. Target object figure of camera calibration
Fig. 13. Reprojection errors of camera calibration. (a) Ellipse fitting method; (b) our proposed method
|
Table 1. Error comparison of sub-pixel edge detection methodsunit: pixel
|
Table 2. Comparison of camera calibration results

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20