
Wen-Qing ZHU, Xin-Yi TANG, Rui ZHANG, Xiao CHEN, Zhuang MIAO. Infrared and visible image fusion based on edge-preserving and attention generative adversarial network[J]. Journal of Infrared and Millimeter Waves, 2021, 40(5): 696
- Journal of Infrared and Millimeter Waves
- Vol. 40, Issue 5, 696 (2021)
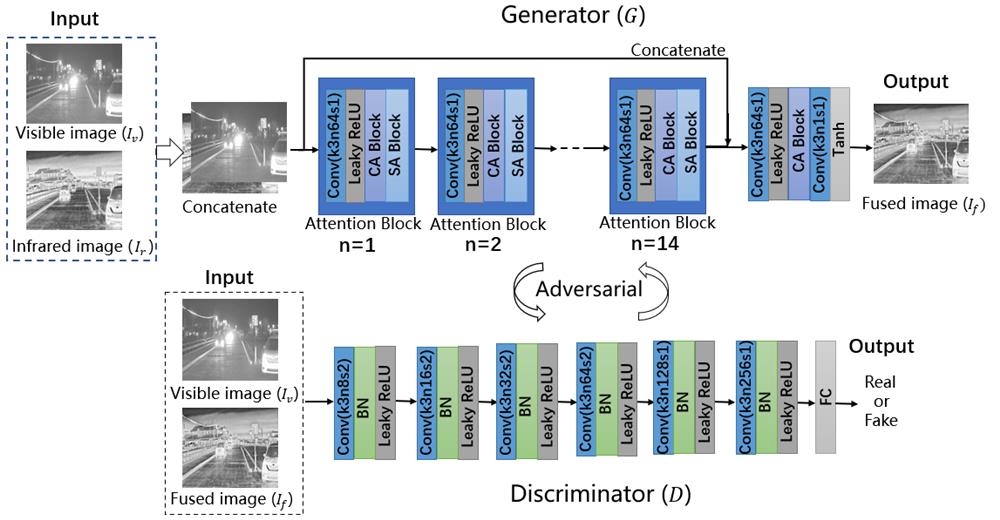
Fig. 1. Architecture of the proposed EAGAN. CA Block:channel attention block,SA Block:spatial attention block,BN:batch normalization,FC:fully connected layer,Conv:corresponding kernel size(k),number of feature maps(n)and stride(s)indicated for each convolutional layer
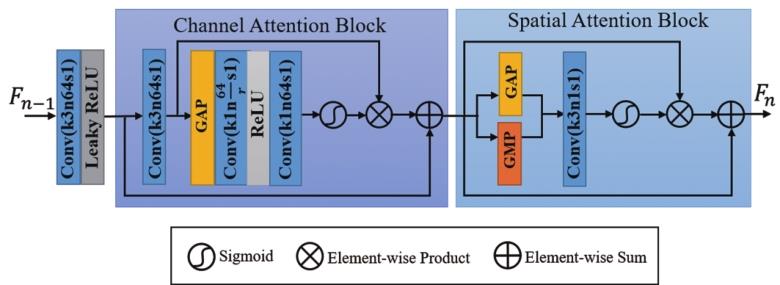
Fig. 2. Architecture of Attention Block. GAP:Global Average Pooling,GMP:Global Max Pooling,r:scaling factor,Conv:corresponding kernel size(k),number of feature maps(n)and stride(s)indicated for each convolutional layer
Fig. 3. Qualitative comparison of different algorithms on 4 typical infrared and visible image pairs. From top to bottom:visible image,infrared image,fusion results of ASR,GFF,GTF,DenseFuse,FusionGAN,RCGAN and our algorithm.
Fig. 4. Qualitative comparison of different algorithms on 5 typical infrared and visible image pairs from TNO dataset. From left to right:Duine sequence,Nato_camp_sequence,Kaptein_1123,men in front of house and soldier_behind_smoke_3. From top to bottom:visible image,infrared image,fusion results of ASR,GFF,GTF,DenseFuse,FusionGAN,RCGAN and our algorithm.
Fig. 5. Qualitative comparison of different algorithms on 4 typical infrared and visible image pairs from INO dataset. From left to right:ParkingSnow,GroupFight,MultipleDeposit,ClosePerson. From top to bottom:visible image,infrared image,fusion results of ASR,GFF,GTF,DenseFuse,FusionGAN,RCGAN and our algorithm.
Fig. 6. Attention weight maps:(a)the infrared image;(b)the visible image;(c)the fused result of our proposed EAGAN;(d)Output result of the third attention block;(e)Channel Attention weight map;(f)Spatial Attention weight map
Fig. 7. The effect of attention mechanism on fusion results:(a)fusion result of the network without attention mechanism;(b)fusion result of our algorithm.
Fig. 8. Fusion results when the loss function of the generator changes:(a)
|
Table 1. Quantitative comparison of different algorithms on RoadScene dataset
|
Table 2. Quantitative comparison of different algorithms on TNO dataset
|
Table 3. Quantitative comparison of different algorithms on INO dataset
|
Table 4. Comparison of effects of attention mechanism on fusion results

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20