
Shengchun Wang, Qiang Han, Hao Wang, Xinxin Zhao, Peng Dai. Laser Stripe Center Extraction Method of Rail Profile in Train-Running Environment[J]. Acta Optica Sinica, 2019, 39(2): 0212004
- Acta Optica Sinica
- Vol. 39, Issue 2, 0212004 (2019)
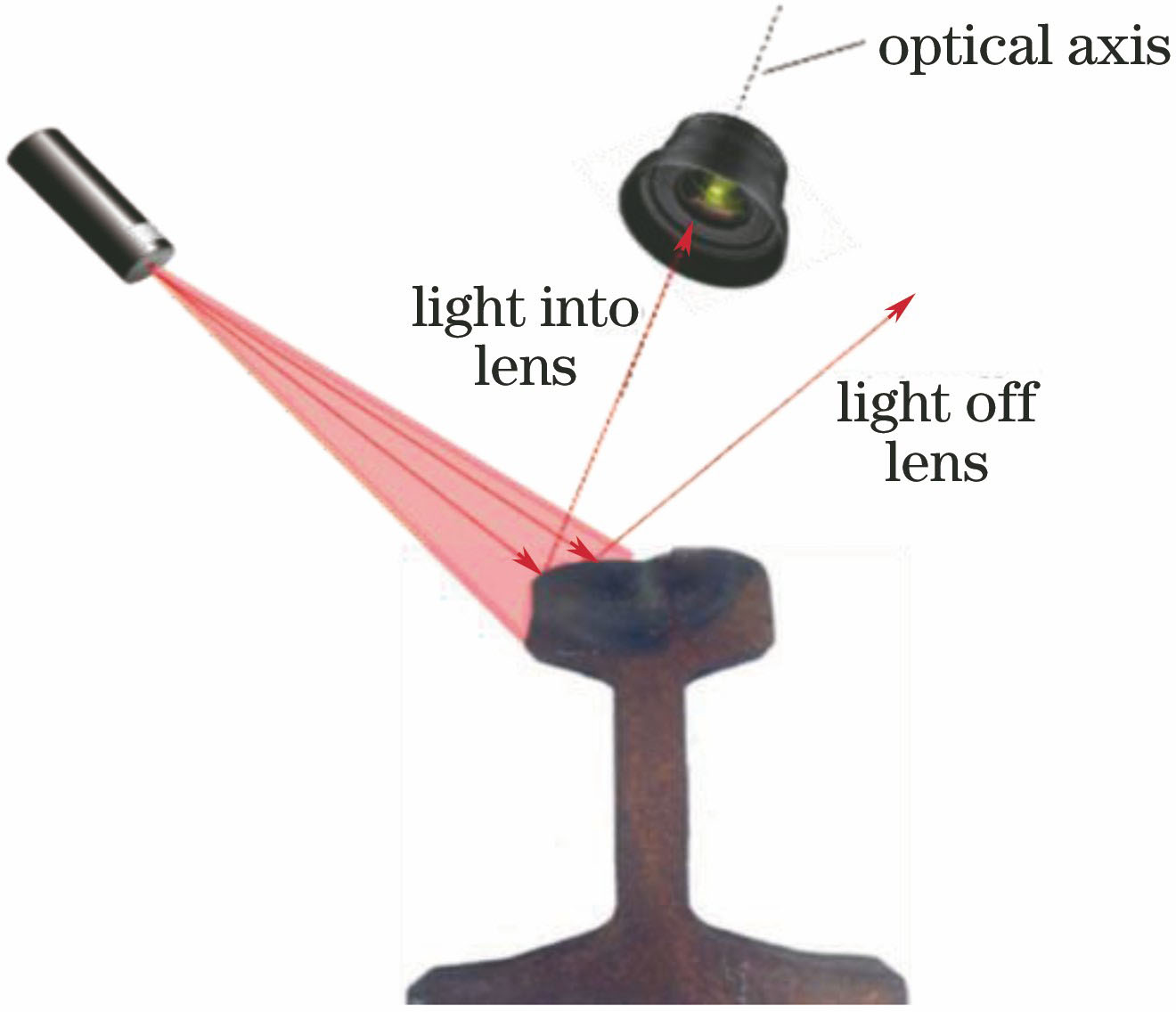
Fig. 1. Mirror reflection and image development
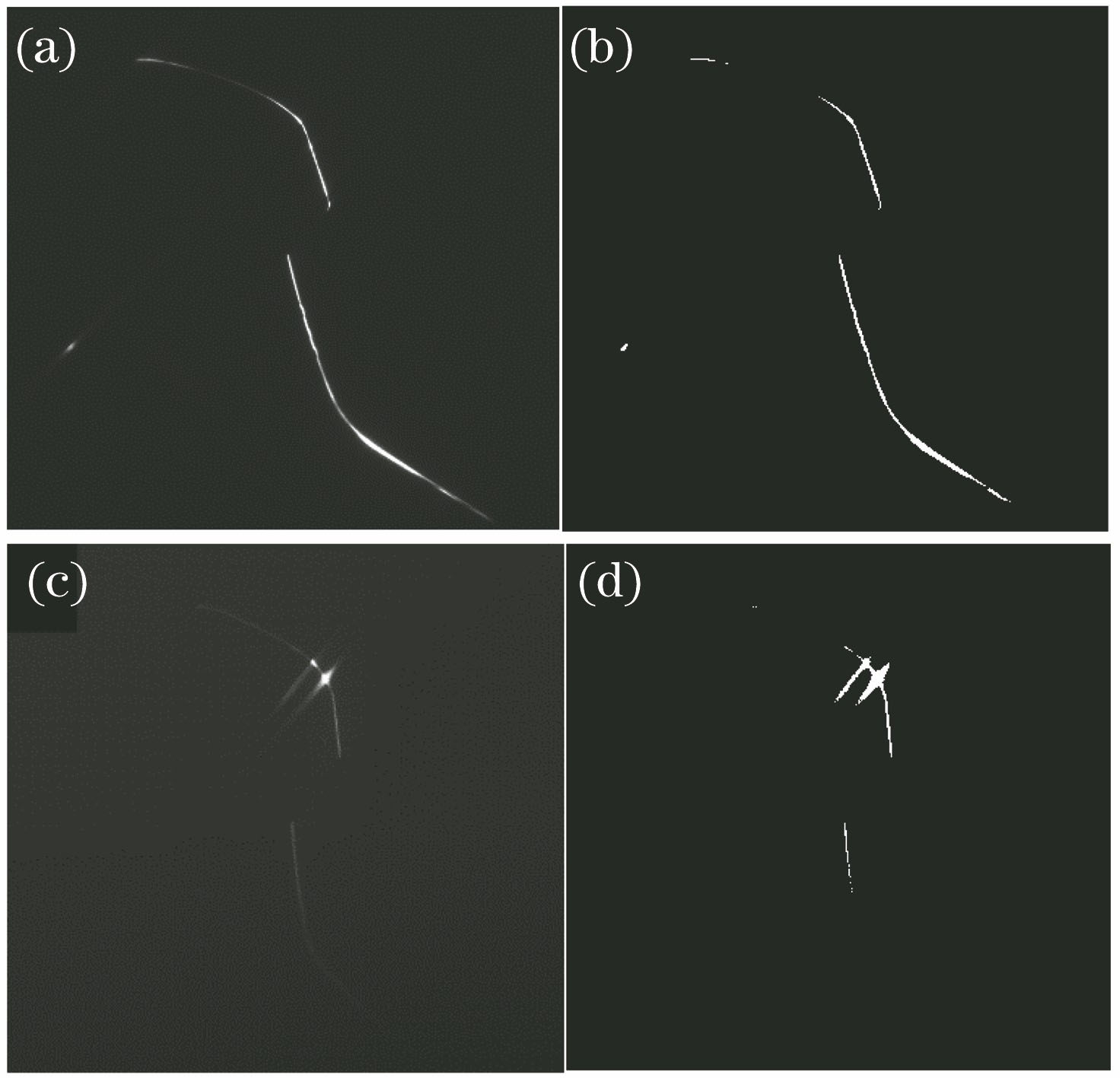
Fig. 2. Effect of mirror reflection on stripe extraction. (a) Mirror reflection at headband; (b) binarization result of Fig. 2(a); (c) mirror reflection on polished rail; (d) binarization result of Fig. 2(c)
Fig. 3. Gray-level distribution characteristics of laser stripe. (a) Laser stripe image; (b) gray-level distribution of laser stripe; (c) local zoom of Fig. 3(a); (d) local zoom of Fig. 3(b)
Fig. 4. Extraction process of light stripe center line based on sub-region multi-template matching
Fig. 5. Image segmentation performance statistics for different depth network structures [14]
Fig. 6. Rail profile data labeling
Fig. 7. Section partition of rail profile laser stripe
Fig. 8. Gradient direction of pixels.(a) Gradient direction solved for whole image; (b) gradient direction solved only on segmented light stripe
Fig. 9. Direction template corresponding to each sub-range of segmentation
Fig. 10. Extraction of pixel-level light stripe center based on direction template
Fig. 11. Extraction of sub-pixel level light stripe center based on gray-level centroid method
Fig. 12. Image rotation and scaling
Fig. 13. Comparison of light stripe segmentation results. (a) Original rail profile image; (b) fixed threshold binarization; (c) dynamic threshold binarization; (d) deep learning segmentation results
Fig. 14. Convolution features of light stripe image. (a) Convolution feature of first layer with size of 16×256×256; (b) convolution feature of second layer with size of 64×128×128; (c) convolution feature of third layer with size of 128×164×164
Fig. 15. Experimental results and corresponding local zoom for different laser stripe center extraction methods. (a) Gray-level centroid method[17]; (b) direction-template method [18]; (c) Steger method [19]; (d) proposed method
Fig. 16. Precision comparison of different laser stripe center extraction methods
Fig. 17. Execution time comparison of different laser strip center extraction methods
|
Table 1. Segmentation time comparison of images with different sizes by ENet

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20