
Haosheng Gao, Chaoying Tang, Xiaoteng Chen, Xiao Yu. Line Tracking Method of Arm Vein Based on Bayesian Theory[J]. Acta Optica Sinica, 2018, 38(2): 0215003
- Acta Optica Sinica
- Vol. 38, Issue 2, 0215003 (2018)
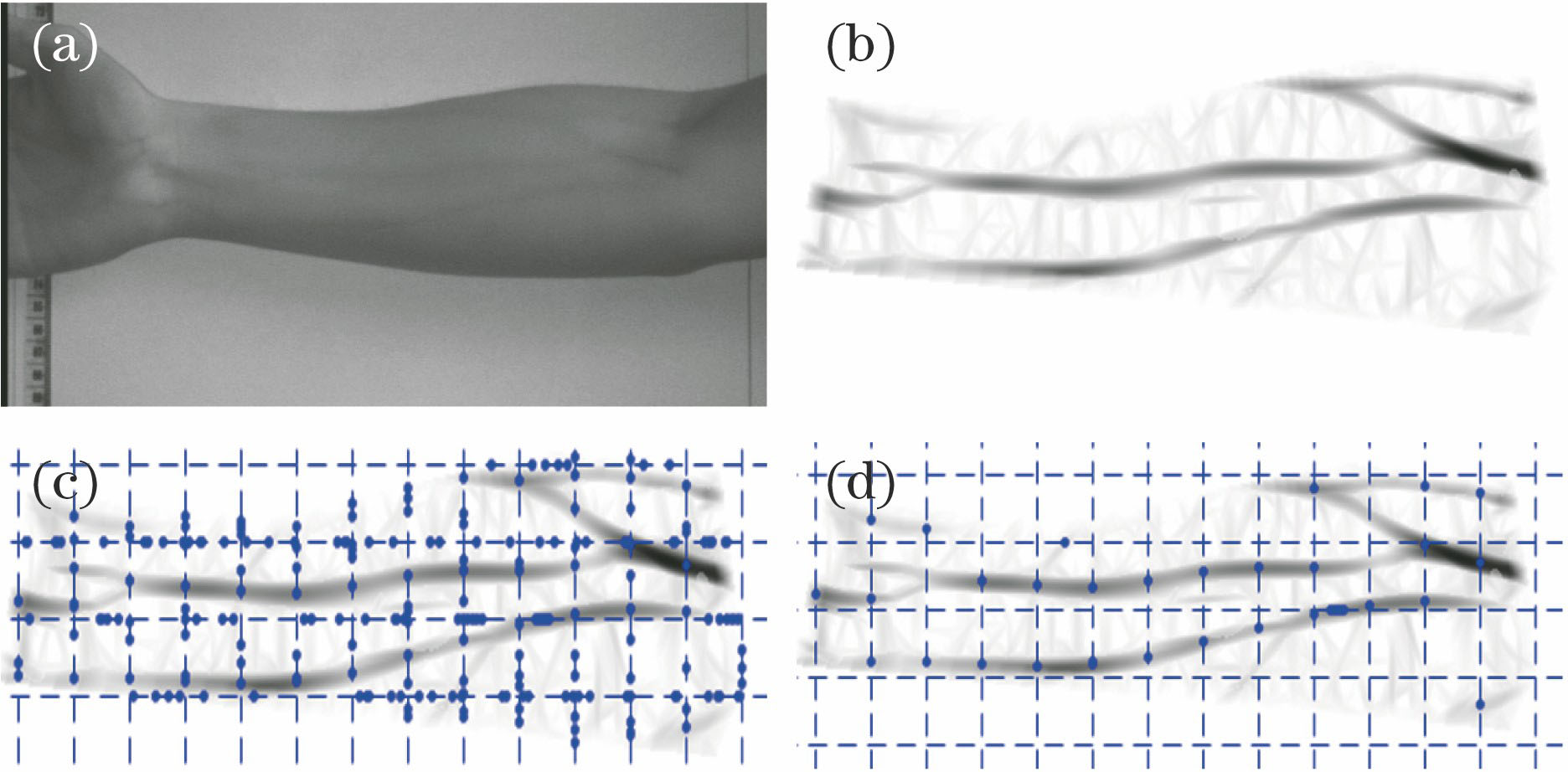
Fig. 1. Determination of initial seed points. (a) NIR image; (b) image after Gabor filtering; (c) grid lines and candidate initial seed points; (d) effective initial seed points
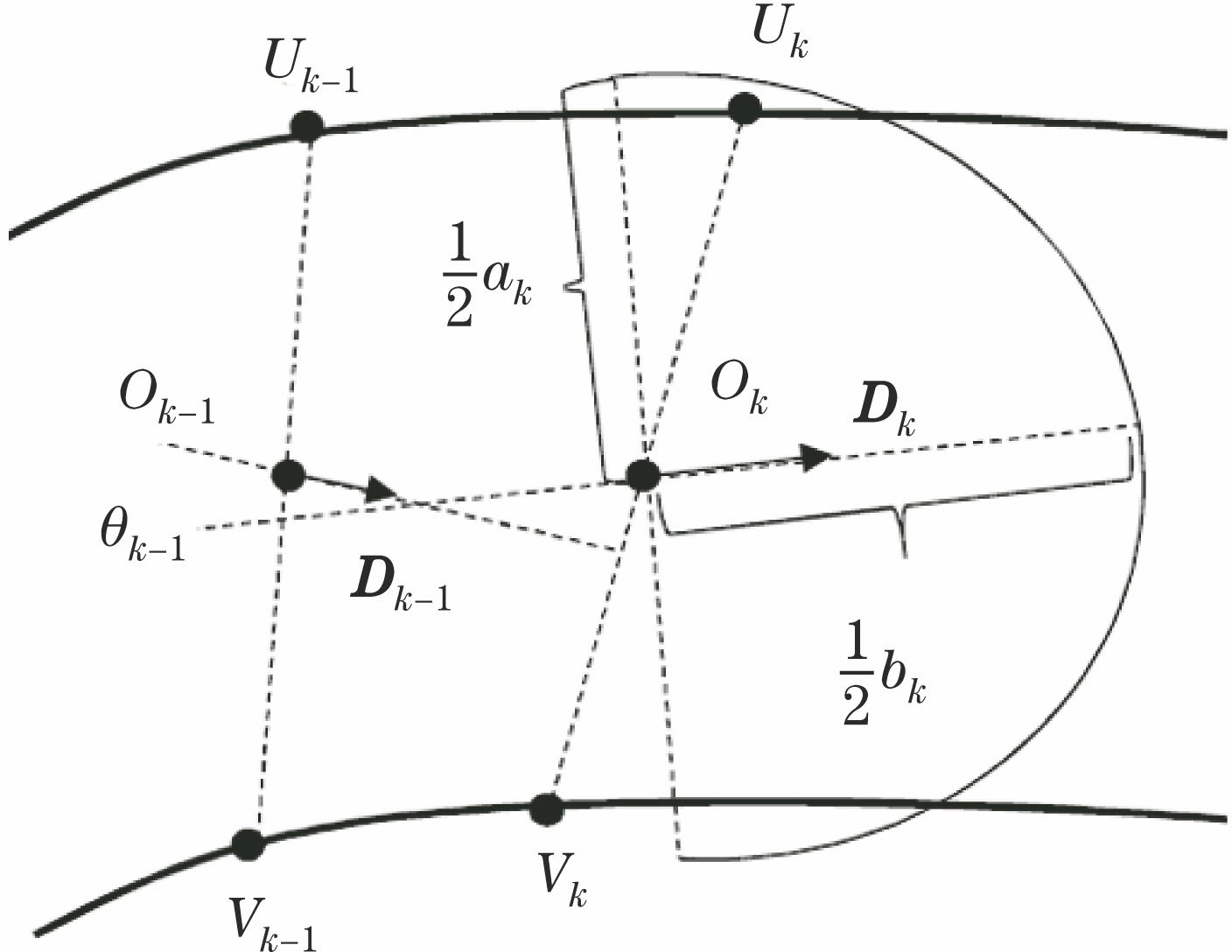
Fig. 2. Dynamic search area of kth iteration
Fig. 3. Partial initial seed points and their corresponding local vessel directions
Fig. 4. Three types of vessel structures. (a) Normal; (b) bifurcation; (c) crossing
Fig. 5. Gaussian model of vessel cross section
Fig. 6. dm1 and dm2 corresponding to normal vessel
Fig. 7. Tracking results. (a) NIR image; (b) image processed with Gabor filter; (c) tracked vessel edge points; (d) edge points of normal vessel; (e) edge points of bifurcation vessel; (f) edge points of crossing vessel
Fig. 8. Comparison of results of three methods. (a) NIR image 1; (b) NIR image 2; (c) image 1 processed with Gabor filter; (d) image 2 processed with Gabor filter; (e) image 1 processed with proposed method; (f) image 2 processed with proposed method; (g) image 1 processed with RLT; (h) image 2 processed with RLT; (i) image 1 processed with LAT; (j) image 2 processed with LAT
Fig. 9. ROC images extracted by three methods. (a) Proposed method; (b) RLT method; (c) LAT method
Fig. 10. Comparison of detection rate of three methods with different SNR. (a) Precision; (b) recall; (c) F-measure
|
Table 1. Comparison of detection rate of three methods

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20