
Peng Zhai, Haihua Cui, Guanglu Hu, Yihua Zhang, Yuting Jin, Yi Huang. Light Plane Calibration Method Using Line Transformation for Line Structured Light Measurement[J]. Laser & Optoelectronics Progress, 2021, 58(2): 0212001
- Laser & Optoelectronics Progress
- Vol. 58, Issue 2, 0212001 (2021)
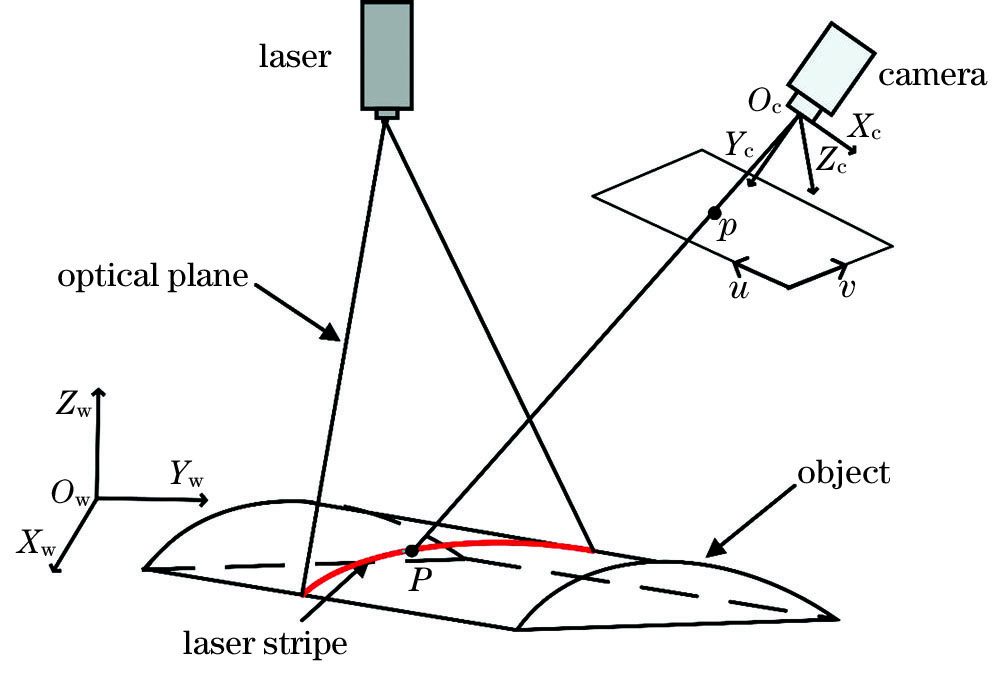
Fig. 1. Schematic of line structed light geometry sensor
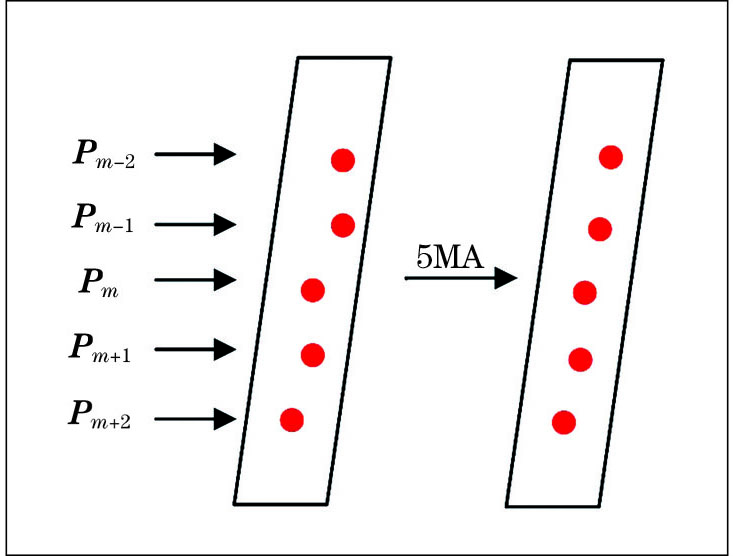
Fig. 2. 5MA smooth
Fig. 3. Two-dimensional projective transformation of a point and a line
Fig. 4. Spatial line transformation model
Fig. 5. Light plane fitted by proposed method
Fig. 6. Light plane fitted by cross ratio method
Fig. 7. Standard step block experiment. (a) Step block and feature points; (b) step point cloud; (c) section shape
Fig. 8. Cylinder experiment. (a) Cylindrical specimen; (b) fitted circle
|
Table 1. Experimental results of two methods
|
Table 2. Measurement results of distance between point C and point D in step block unit: mm
| |||||||||||||||||||||||||||||||
Table 3. Measurement results of cylinder unit: mm

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20