
Rongrong Lu, Feng Zhu, Qingxiao Wu, Yunge Cui, Yanzi Kong, Foji Chen. A Fast Segmenting Method for Scenes with Stacked Plate-Shaped Objects[J]. Acta Optica Sinica, 2019, 39(4): 0412003
- Acta Optica Sinica
- Vol. 39, Issue 4, 0412003 (2019)

Fig. 1. Segmentation results obtained with two algorithms. (a) 3D point cloud (top view); (b) segmentation result obtained with original RANSAC algorithm; (c) segmentation result obtained with modified algorithm
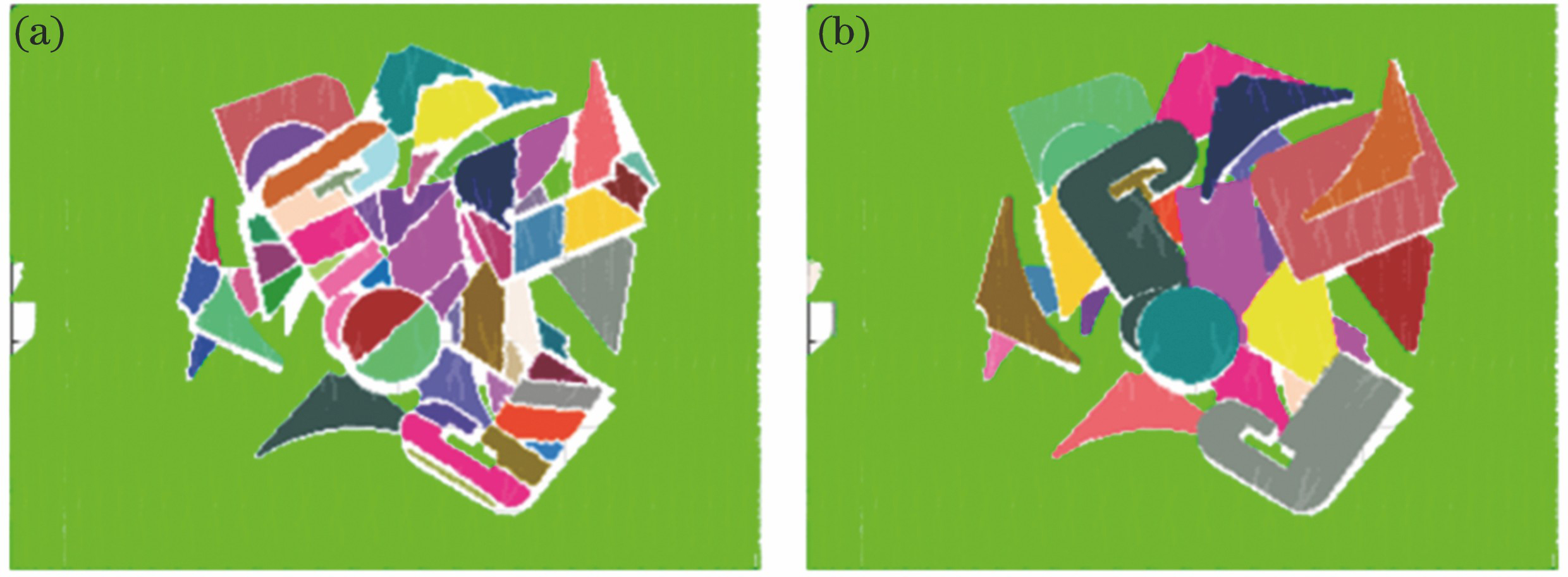
Fig. 2. Results obtained before and after region merging. (a) Connected planar regions; (b) merged result obtained with glue algorithm
Fig. 3. Intermediate results obtained with proposed algorithm. (a) Connected planar regions; (b) merged result obtained with glue algorithm; (c) binary image corresponding to the red connected region; (d) binary image after erosion; (e) final segmentation result
Fig. 4. Plate-shaped objects and data acquisition platform. (a) Six types of plate-shaped objects; (b) simple scene; (c) complex scene
Fig. 5. An illustration of depth image and its corresponding three-dimensional point cloud. (a) Depth image; (b) three-dimensional point cloud (top view); (c) amplified three-dimensional point cloud
Fig. 6. Segmentation results obtained with four algorithms. (a) Depth images; (b) Canny edge algorithm; (c) K-means algorithm; (d) RANSAC algorithm; (e) region growing algorithm
Fig. 7. Comparison between original depth image and labeled images. (a) Original depth image; (b) ground truth (gray image); (c) ground truth (color image)
Fig. 8. Segmentation results obtained with proposed algorithm on twenty simple scenes
Fig. 9. Segmentation results obtained with two algorithms on S6, S8 and S15 scenes.(a) Proposed method; (b) region growing algorithm
Fig. 10. Segmentation results obtained with two algorithms on ten complex scenes. (a) Proposed method; (b) region growing algorithm
|
Table 1. Parameter setting of proposed algorithm
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Segmentation accuracy obtained with proposed algorithm and region growing algorithm on twenty simple scenes and ten complex scenes
| |||||||||||||||||||
Table 3. Average time cost obtained with proposed algorithm and region growing algorithm on twenty simple scenes and ten complex scenes

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20