
Yu Bo, Ma Shuhao, Li Hongyan, Li Chungeng, An Jubai. Real-Time Pedestrian Detection for Far-Infrared Vehicle Images and Adaptive Instance Segmentation[J]. Laser & Optoelectronics Progress, 2020, 57(2): 21507
- Laser & Optoelectronics Progress
- Vol. 57, Issue 2, 21507 (2020)
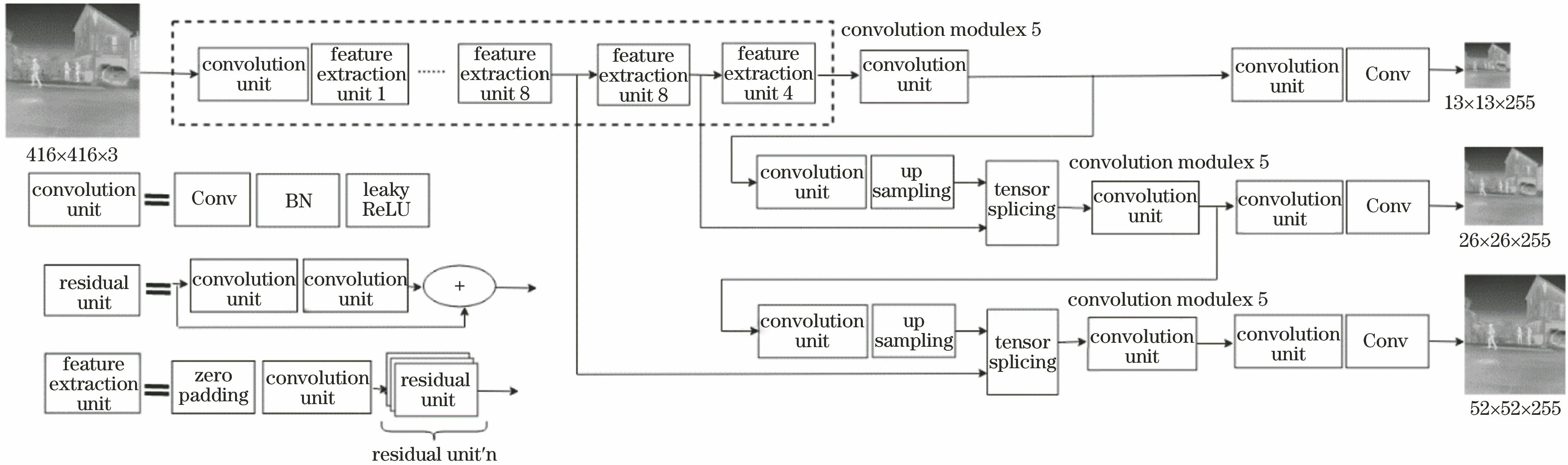
Fig. 1. Structural diagram of YOLO v3
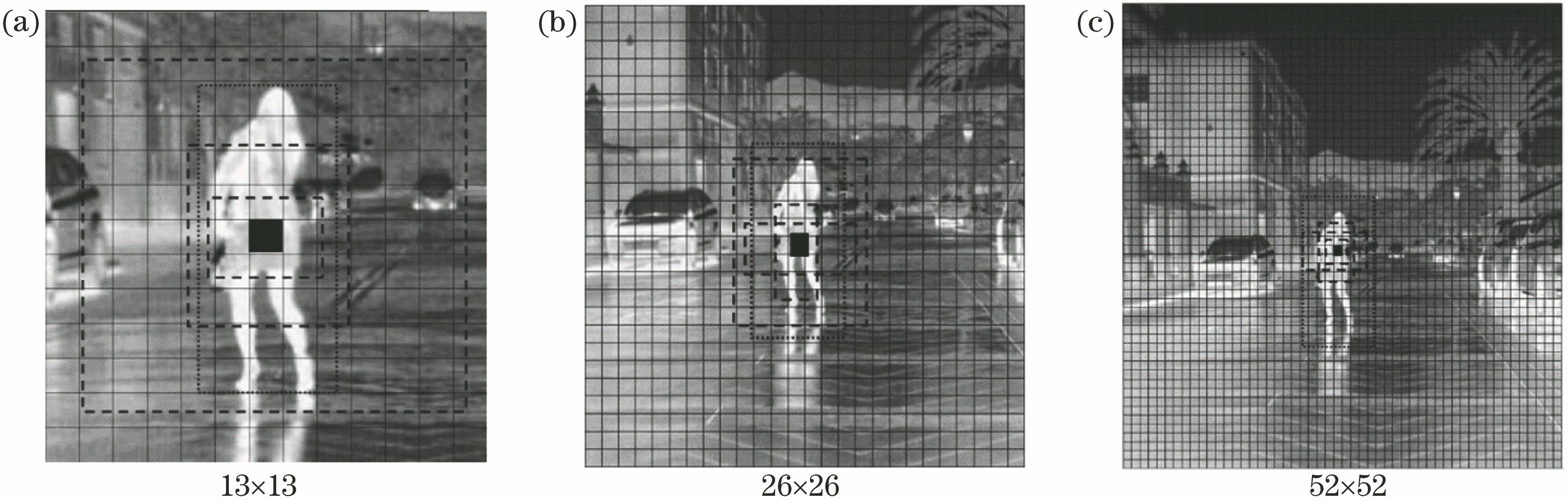
Fig. 2. Visual representation of default anchor box
Fig. 3. Visual representation of our anchor box
Fig. 4. Target area location map
Fig. 5. Gray histogram of pedestrian object image
Fig. 6. Denoising image
Fig. 7. Threshold segmentation image
Fig. 8. Closed operation image
Fig. 9. Connected area mask
Fig. 10. Instance segmentation effect diagrams for FLIR dataset. (a) Instance segmentation results; (b) manual labeling results
Fig. 11. Instance segmentation effect diagrams for our dataset. (a) Instance segmentation results; (b) manual labeling results
Fig. 12. Comparison of results of algorithms. (a) FLIR dataset; (b) our dataset
Fig. 13. P-R curves of FLIR dataset algorithm
Fig. 14. P-R curves of our dataset algorithm
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Nine anchor size ratios
| |||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Algorithm performance evaluation table
|
Table 3. IOU evaluation table

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20