
Yuchuan Han, He Hou, Yunrui Bai, Xianfeng Zhu. A Closed Point Cloud Edge Extraction Algorithm Using Edge Coefficient[J]. Laser & Optoelectronics Progress, 2018, 55(11): 111003
- Laser & Optoelectronics Progress
- Vol. 55, Issue 11, 111003 (2018)
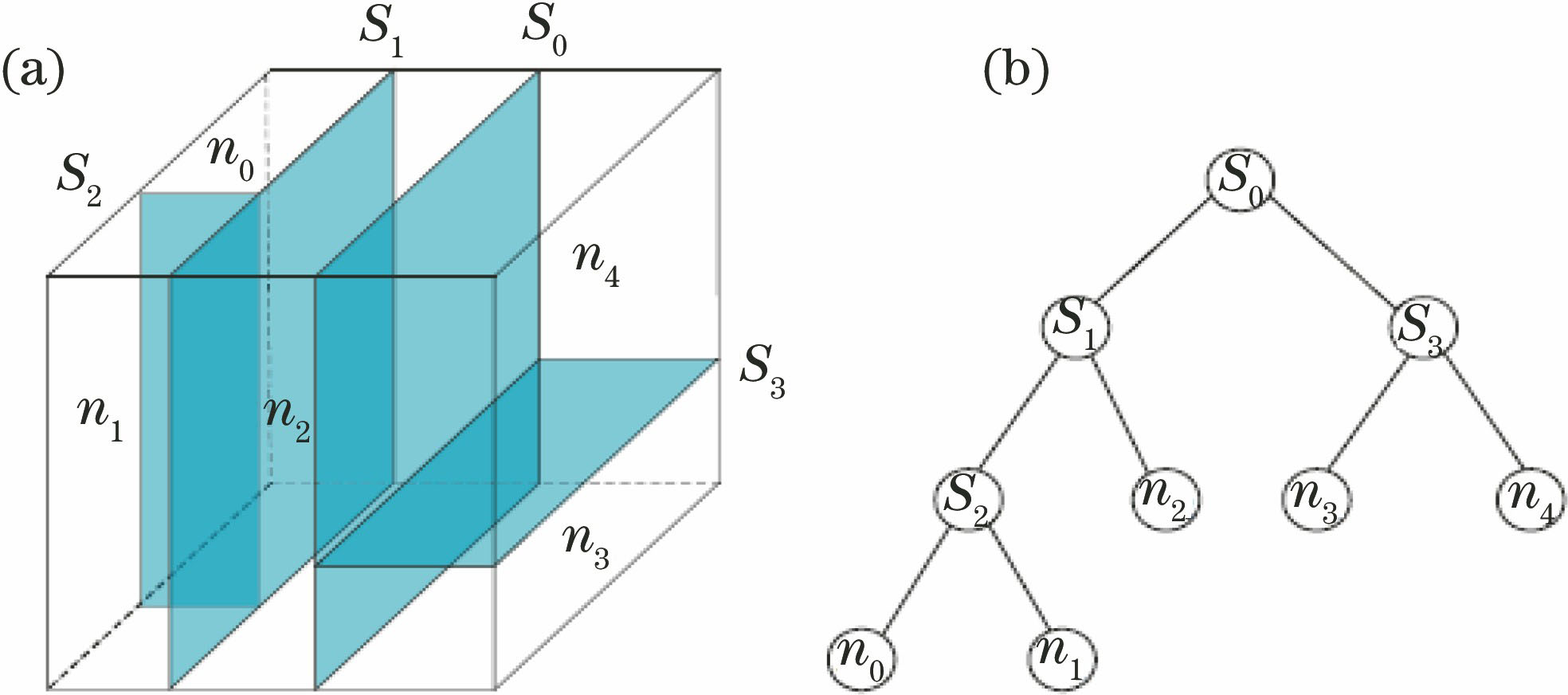
Fig. 1. (a) 3D kd-tree (interior nodes are labeled as their splitting planes and leaf nodes are labeled in their boxes); (b) graph representation of the same kd-tree
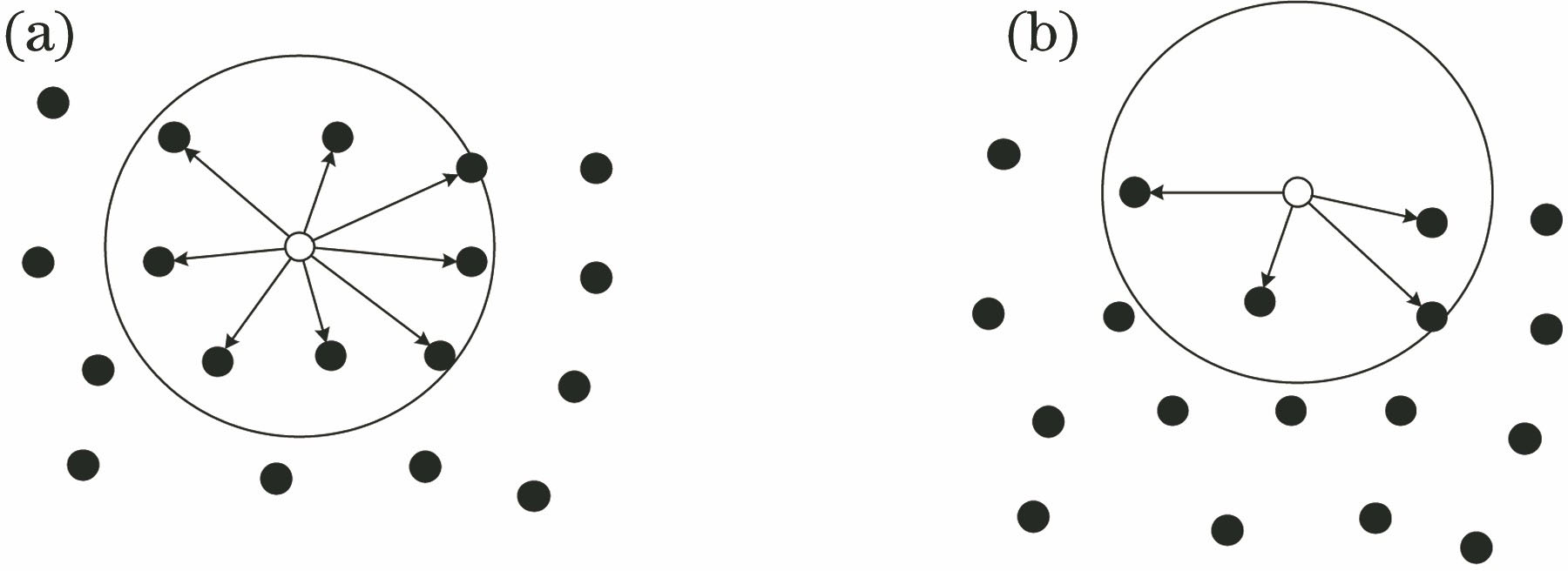
Fig. 2. Tension. (a) Tension at the non-edge points; (b) tension at the edge points
Fig. 3. Case of selecting the new seed point when the point clouds are evenly aligned
Fig. 4. Search angle
Fig. 5. P2 will be ignored if the search angle is too small
Fig. 6. (a) Result of the space plane with sharp edge formed by the ideal point clouds; (b) extraction result at the sharp edge; (c) smooth effect at the depression edge obtained by the algorithm
Fig. 7. (a) Closed edge extracted by one initial seed edge point; (b) all edges extracted by six initial seed edge points; (c) effect of uneven distribution of point clouds on edge extraction
Fig. 8. Results for different neighbor radii and search angles of two intersecting cylinders. (a) R=R0, θ=100°; (b) R=R0, θ=135°; (c) R=1.5R0, θ=100°; (d) R=1.5R0, θ=135°
Fig. 9. Edge coefficient method
Fig. 10. Eight-neighbor depth method
|
Table 1. Hole edge extraction time

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20