
Wu Zhou, Fangting Wang, Xiaoxiao Wang, Xinran Tang, Xiaoshu Cai. Particle Streak Velocimetry Method Based on Binocular Vision and Multiple Exposure[J]. Acta Optica Sinica, 2021, 41(12): 1215001
- Acta Optica Sinica
- Vol. 41, Issue 12, 1215001 (2021)
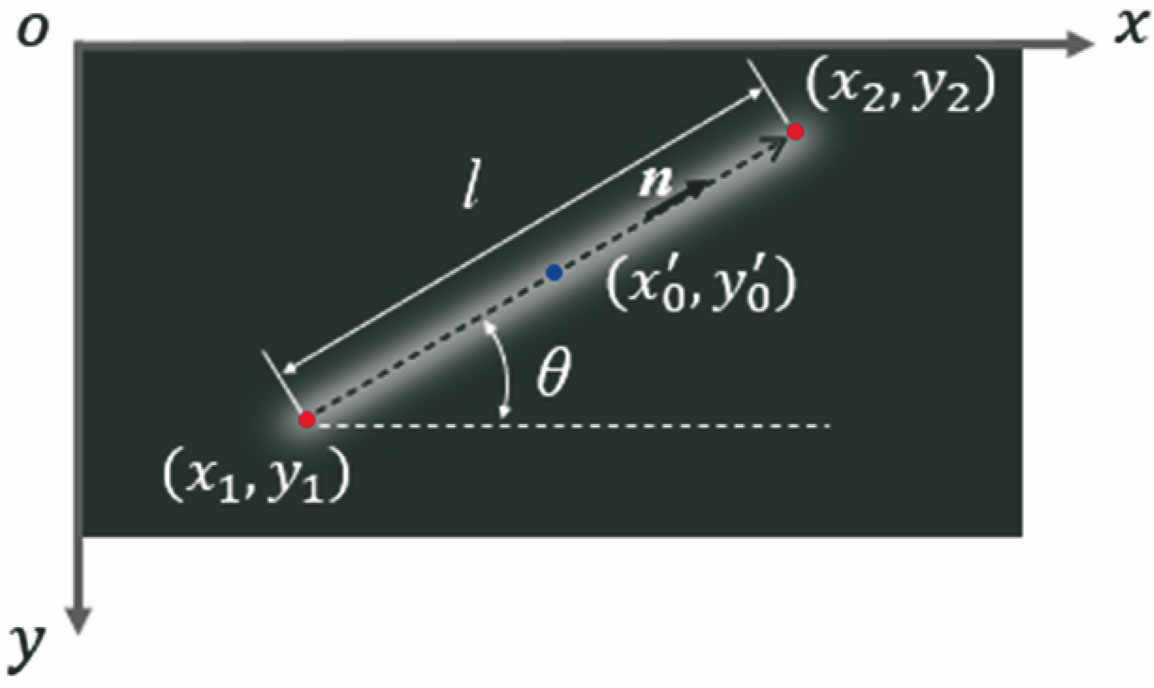
Fig. 1. Trajectory image of a particle

Fig. 2. Comparison of trajectory endpoints between different recognition methods. (a) Image of a trajectory; (b) result of image binarization and skeletonizing (threshold for 0.1); (c) result of gray-level fitting
Fig. 3. Schematic of single-frame multi-exposure trajectory matching
Fig. 4. Schematic diagrams of binocular matching of multi-exposure PSV images. (a) Trajectories from the left camera; (b) trajectories from the left camera; (c) drawing of partial enlargement
Fig. 5. Image processing flow for binocular vision PSV
Fig. 6. Image processing process. (a) Image after distortion correction; (b) recognition of short exposure points; (c) recognition of long trajectories; (d) extracted original image of every sub-trajectory; (e) image of obtaining endpoints from gray-level fitting; (f) image of multiple trajectories matching
Fig. 7. Photo of experimental system
Fig. 8. Trajectory images for the condition of 0° and 60 mm/s. (a) Image from the left camera; (b) image from the right camera
Fig. 9. Measurement results and standard deviations under different setting velocities. (a) Rail is parallel to the imaging plane of the left camera; (b) rail has an angle of 30° with the imaging plane of the left camera
Fig. 10. Photo of experimental device
Fig. 11. Experimental measurement results. (a) Image from the left camera; (b) image from the right camera; (c) identified trajectories on the left image; (d) identified trajectories on the right image; (e) trajectories of particles in three-dimensional coordinate system; (f) disparity map

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20