
Shiyong An, Jiangping Zhu, Hongyu Yang, Pei Zhou, Wenfan Xiao, Changhui Zhu. Simulation and Experiment Research on Camera Calibration Based on Absolute Phase Target[J]. Laser & Optoelectronics Progress, 2022, 59(4): 0412001
- Laser & Optoelectronics Progress
- Vol. 59, Issue 4, 0412001 (2022)
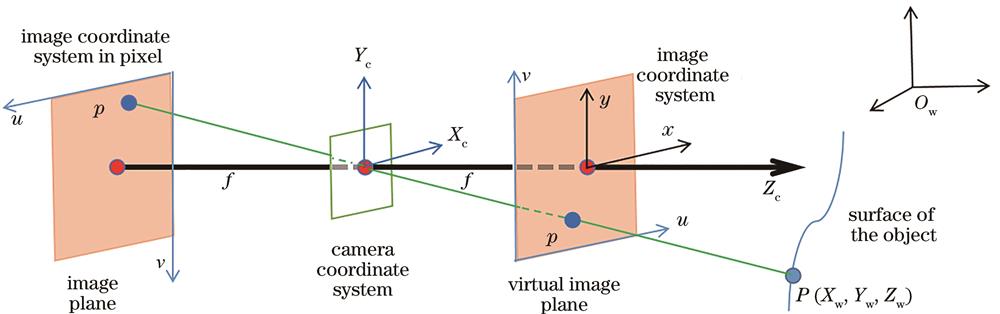
Fig. 1. Camera imaging model
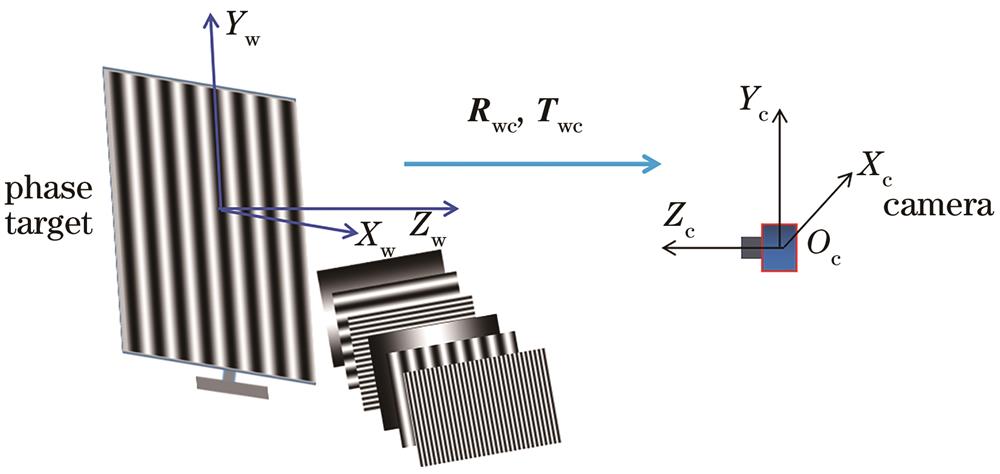
Fig. 2. Simulation vision system based on absolute phase calibration method
Fig. 3. 22 simulated poses in the camera's view
Fig. 4. Part of the simulated images
Fig. 5. Simulated results. (a) Pixel error in
Fig. 6. Absolute error at different noise levels. (a)(d)(g) Absolute error of checkerboard calibration method; (b)(e)(h) absolute error of circle calibration method; (c)(d)(g) absolute error of APT calibration method
Fig. 7. Absolute error at different fuzzy levels. (a)(d)(g) Absolute error of checkerboard calibration method; (b)(e)(h) absolute error of circle calibration method; (c)(d)(g) absolute error of APT calibration method
Fig. 8. APT experimental device
Fig. 9. Part calibration images and part feature points. (a)(c)(e) In-focus images; (b)(d)(f) out-of-focus images
Fig. 10. Target poses in the camera's view. (a) 16 poses under in-focus condition; (b) 14 poses under out-of-focus condition
Fig. 11. Re-projection errors of three calibration methods under in-focus condition. (a) Checkerboard calibration method; (b) circle calibration method; (c) APT calibration method
Fig. 12. Re-projection errors of three calibration methods when the target is far away from the effective working distance of the camera. (a) Checkerboard calibration method; (b) circle calibration method; (c) APT calibration method
Fig. 13. Column charts of world coordinate difference before and after optimization. (a)(d) Checkerboard calibration method under in-focus condition and out-of-focus condition; (b)(e) circle calibration method under in-focus condition and out-of-focus condition; (c)(f) APT calibration method under in-focus condition and out-of-focus condition
|
Table 1. Systematic errors of visual simulation system and calibration software
|
Table 2. Calibration results of the camera
|
Table 3. Calibration results when the target is far away from the effective working distance of the camera

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20