
Li Yan, Rui Wang, Hua Liu, Changjun Chen. Stereo Matching Method Based on Improved Cost Computation and Adaptive Guided Filter[J]. Acta Optica Sinica, 2018, 38(11): 1115007
- Acta Optica Sinica
- Vol. 38, Issue 11, 1115007 (2018)
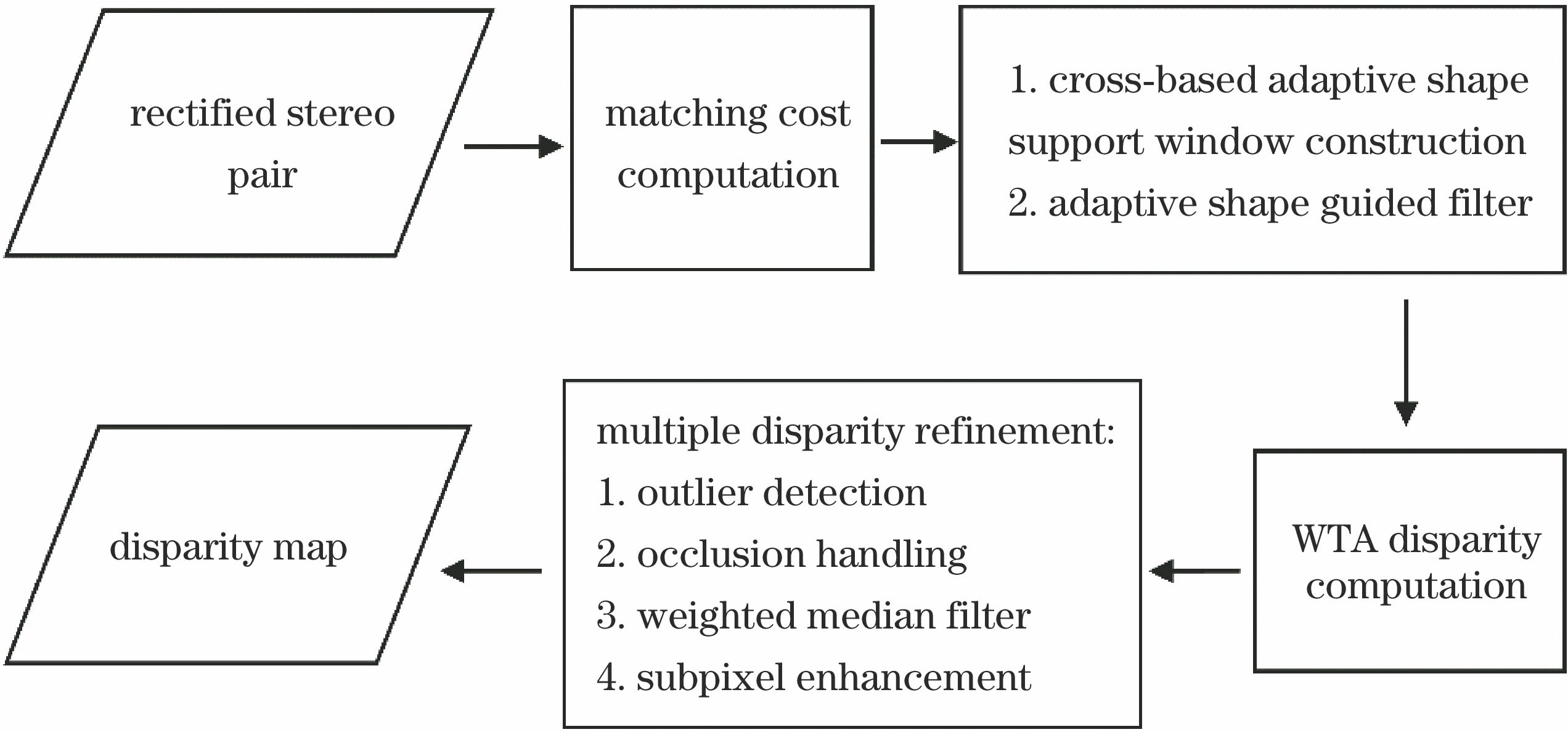
Fig. 1. Diagram of proposed method
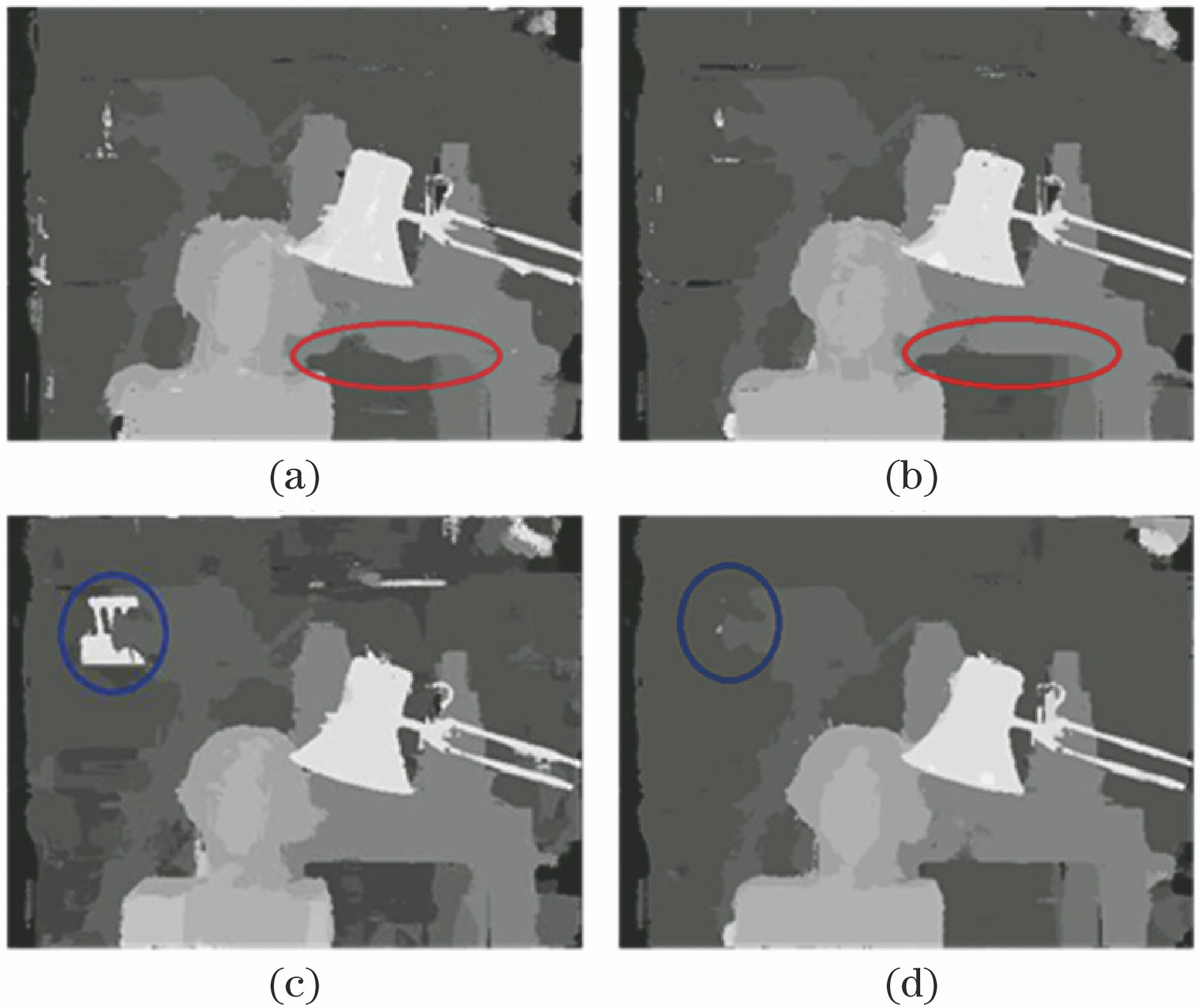
Fig. 2. Initial disparity maps based on different cost methods for Tsukuba. (a) Absolute difference in images gradients; (b) absolute difference in enhanced images gradients; (c) traditional Census transform; (d) Census transformation based on enhanced images gradients
Fig. 3. Schematic of adaptive window construction. (a) Cross-based support region construction; (b) adaptive window in Ref. [17]; (c) adaptive window in Ref. [14]; (d) adaptive window in proposed method
Fig. 4. Disparity maps under different illumination conditions for Aloe and Baby1. (a) Left image; (b) right image; (c) ground truth; (d) SAD+Grad; (e) AD+Cen; (f) AD+Grad+Cen; (g) proposed cost computation
Fig. 5. Disparity maps with different exposures for Aloe and Baby1. (a) Left image; (b) right image; (c) ground truth; (d) SAD+Grad; (e) AD+Cen; (f) AD+Grad+Cen; (g) proposed cost computation
Fig. 6. Disparity maps of different cost aggregation algorithms for textureless images. (a) Left images; (b) ground truth maps; (c) results of local stereo method based on guided filter; (d) error maps for method based on guided filter; (e) results of the proposed method; (f) error maps of the proposed method
Fig. 7. Experimental results on different parameter settings
|
Table 1. Experimental parameter settings
|
Table 2. Error matching rates of various cost computations under different illuminations%
|
Table 3. Error matching rates of various cost computations under different exposures%
|
Table 4. Error matching rates of various cost computations without radiometric changes%
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 5. Error matching rates of different algorithms for different images%
|
Table 6. Error matching rates of different algorithms in all regions%
|
Table 7. Error matching rates of different algorithms for textureless images%
|
Table 8. Runtime comparison of different algorithms for benchmark stereo imagess

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20