
Yaxin Ye, Jiasheng Wang, Fengyun Wu, Siyu Chen, Puye Ai, Xiangjun Zou, Lanyun Li. Target Recognition and Localization, Bounding Box Optimization of Disinfection Robot[J]. Laser & Optoelectronics Progress, 2022, 59(4): 0415008
- Laser & Optoelectronics Progress
- Vol. 59, Issue 4, 0415008 (2022)
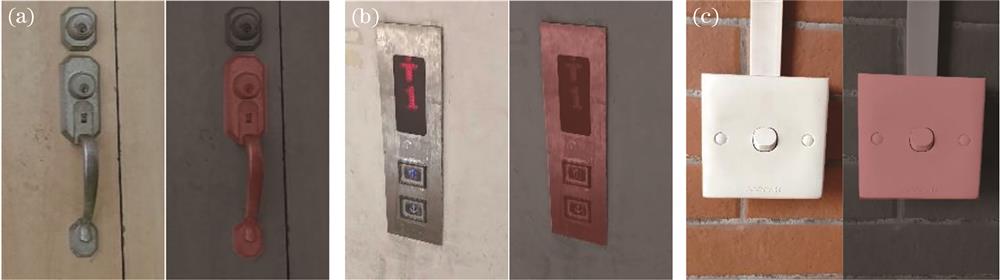
Fig. 1. Annotation effect of dataset samples. (a) Handle; (b) button of elevator; (c) button of light
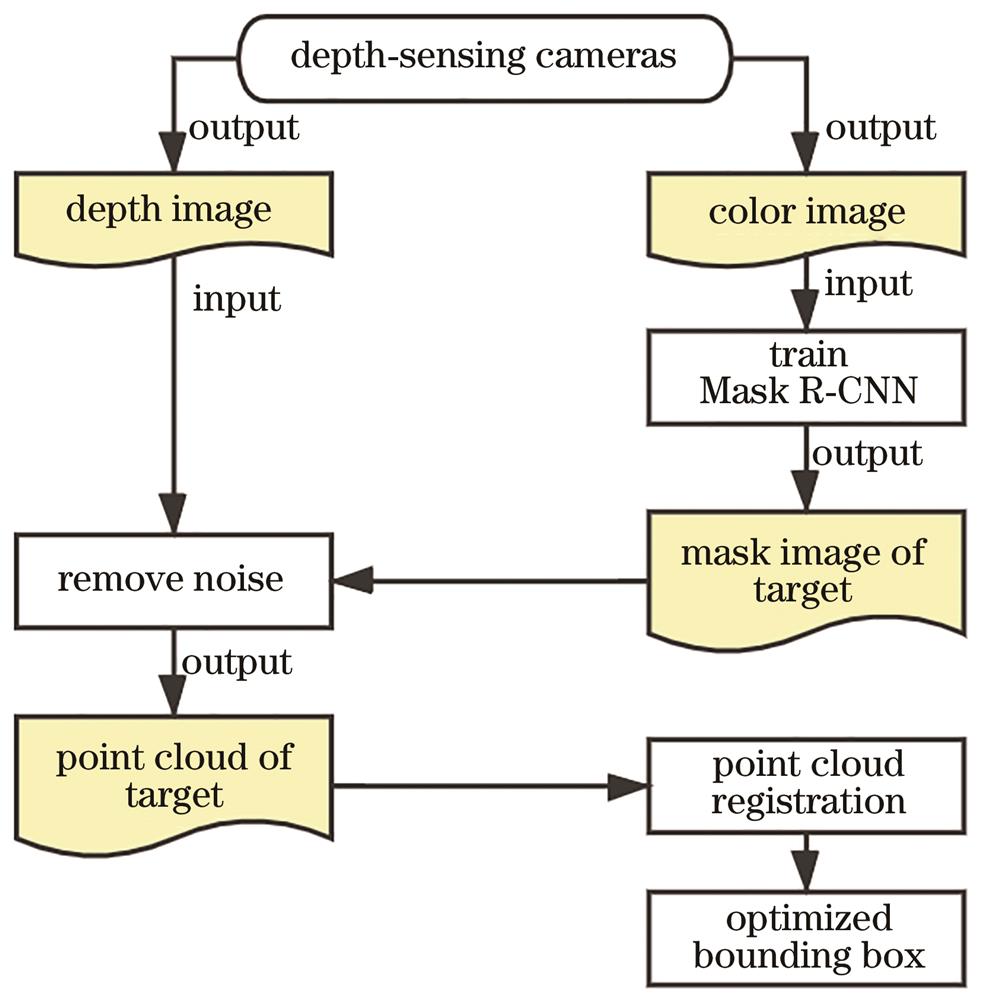
Fig. 2. Workflow of this research
Fig. 3. Mask R-CNN architecture
Fig. 4. Occlusion caused by different viewpoints of two cameras
Fig. 5. Point cloud edge noise filtering algorithm based on depth statistics. (a) Instance segmentation edge error; (b) edge noise of point clouds; (c) denoising effect
Fig. 6. Point cloud registration result. (a) Point cloud from perspective one; (b) point cloud from perspective two; (c) merged point cloud
Fig. 7. Optimization effect of bounding box based on PCA. (a) Simple bounding box; (b) optimized bounding box; (c) optimization effect
Fig. 8. Long arm disinfection robot and control debugging experiment scene. (a) Long arm disinfection robot; (b) control debugging experiment scene
Fig. 9. Diagram of IoU calculation
Fig. 10. Example instance segment result predicted by Mask R-CNN
Fig. 11. Comparison of surface area of bounding box before and after optimization. (a) Handle; (b) button of elevator; (c) button of light
Fig. 12. Comparison of bounding box volume before and after optimization. (a) Handle; (b) button of elevator; (c) button of light
|
Table 1. Configuration list of network training parameters
| |||||||||||||||||||||||||
Table 2. Object detection result
|
Table 3. Mask R-CNN training results
|
Table 4. Optimization rate of bounding box surface area for various disinfection targets
|
Table 5. Optimization rate of bounding box volume for various disinfection targets

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20