
Yanqing Shi, Caixia Chang, Xiaohong Liu, Ziyu Li, Zonghua Zhang, Nan Gao, Zhaozong Meng. Calibration Methods and Progress for Internal and External Parameters of Area-Array Camera[J]. Laser & Optoelectronics Progress, 2021, 58(24): 2400001
- Laser & Optoelectronics Progress
- Vol. 58, Issue 24, 2400001 (2021)
![Imaging model of pinhole camera[23]](/richHtml/lop/2021/58/24/2400001/img_1.jpg)
Fig. 1. Imaging model of pinhole camera[23]
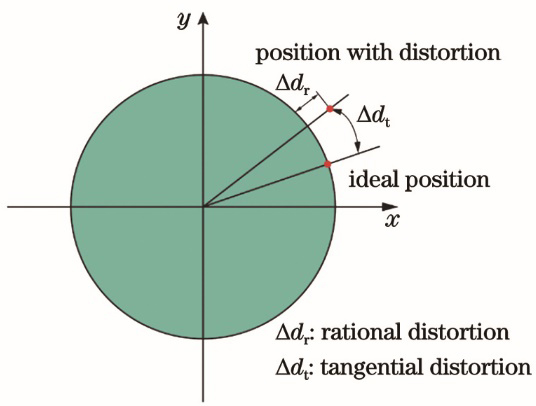
Fig. 2. Lens distortion
Fig. 3. Plane calibration boards. (a) Checkerboard; (b) solid circle; (c) concentric ring; (d) phase target
Fig. 4. Radial distortion of lens
Fig. 5. Partial processes of chessboard calibration method. (a) Checkerboard patterns captured by camera under different poses; (b) corners of calibration image
Fig. 6. Double parallel plane model
Fig. 7. Schematic of perspective protection of spatial circle[31]
Fig. 8. Perspective projection transformation of spatial concentric circle[33]. (a) Concentric circle in object plane; (b) concentric circle in imaging plane
Fig. 9. Principle diagram of line-edge segmentation[40]. (a) Principle of segmentation; (b) result of segmentation
Fig. 10. Iterative calibration process of circular feature points on target[46]
Fig. 11. Phase target patterns. (a) Horizontal sinusoidal fringe; (b) vertical sinusoidal fringe; (c) phase target determined by horizontal and vertical sinusoidal fringes
Fig. 12. Mapping relationship between world coordinates of phase points and camera pixel coordinates[55]
Fig. 13. New applications of camera technology. (a) Optical system and opto-mechanical image of spatial fisheye camera[94]; (b) 3D shape measurement of specular objects based on bi-telecentric lens camera[95]; (c) application and calibration of underwater camera[96]; (d) application and calibration of defocus camera[97]
Fig. 14. Checkerboard images before and after calibration [103]. (a) Distorted; (b) corrected
Fig. 15. Self-calibration method in Ref. [104]
Fig. 16. Calibration of wide-angle lens distortion[103]. (a) Diagram of experimental apparatus; (b) radial distorted phase distribution
Fig. 17. Schematic of bi-telecentric camera system[106]
Fig. 18. Calibration process of defocus camera[117]
Fig. 19. Estimation procedures of defocus map[97]
Fig. 20. Calibration process of camera[116]
|
Table 1. Performance comparison among different calibration methods

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20