
Rui Wang, Xiuqin Su, Yongming Qiao, Tao Lv, Xuan Wang, Kaidi Wang. Decoupling control of fast steering mirror based on dual feedforward + dual neural network adaptive[J]. Infrared and Laser Engineering, 2021, 50(11): 20210194
- Infrared and Laser Engineering
- Vol. 50, Issue 11, 20210194 (2021)
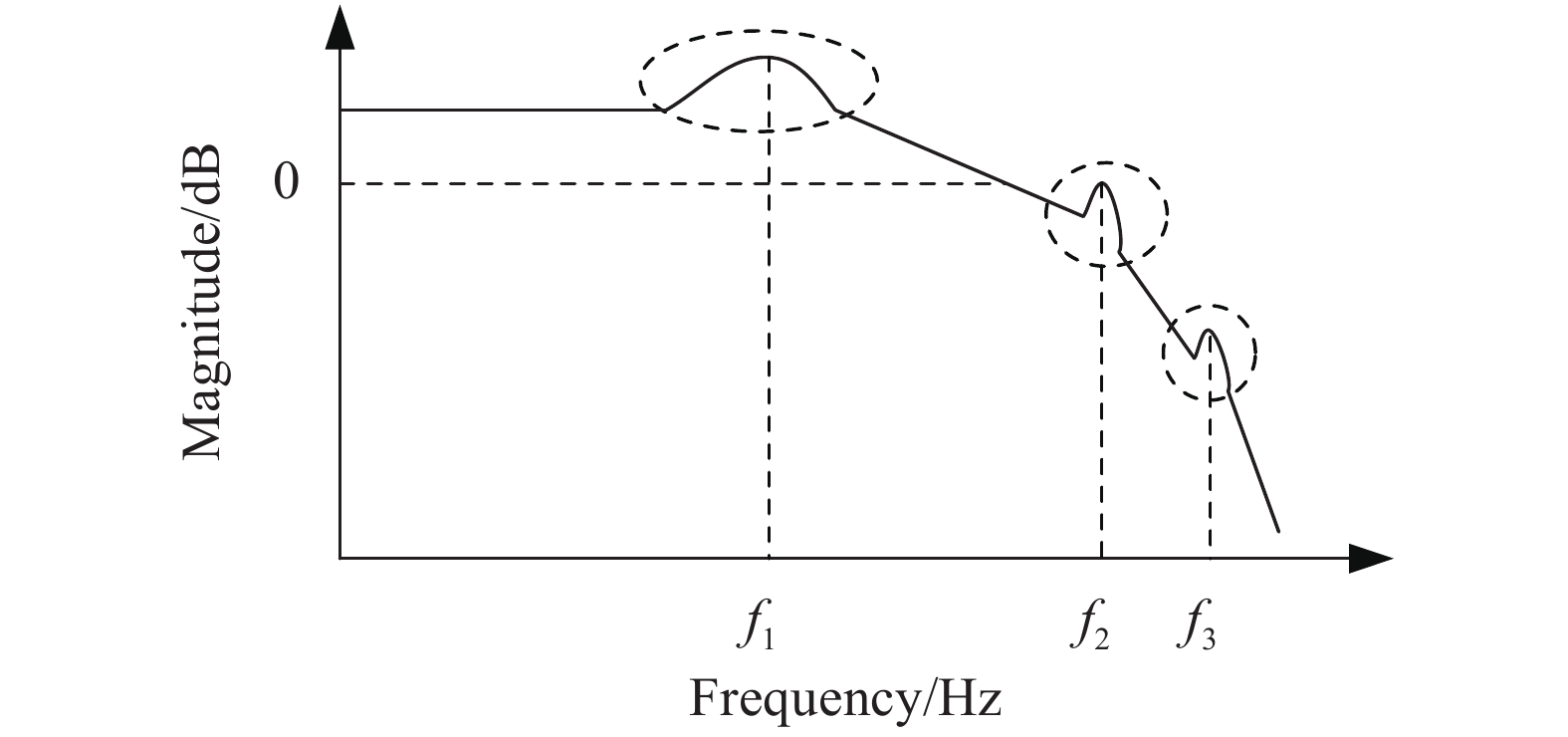
Fig. 1. Schematic diagram of structure resonant frequency of FSM
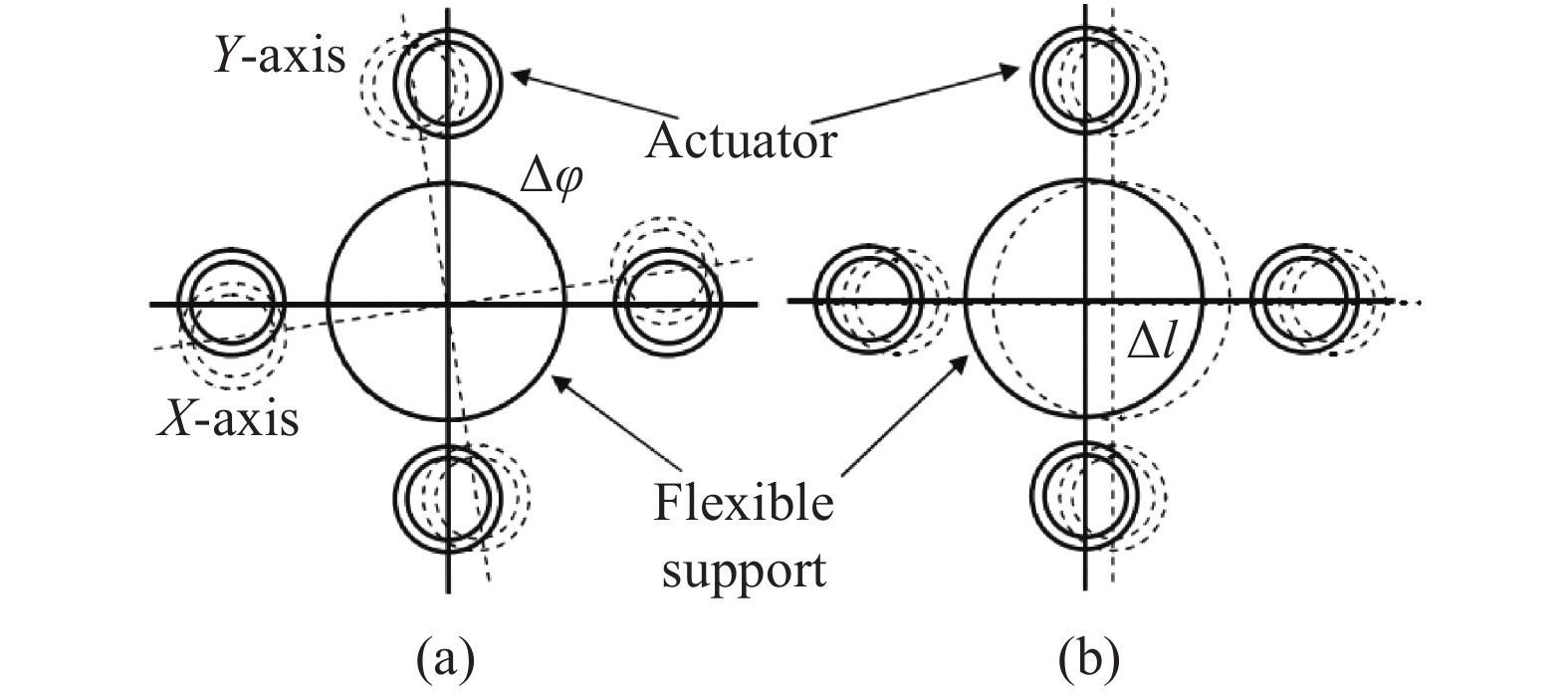
Fig. 2. Schematic diagram of FSM assembly axis not coinciding with working axis
Fig. 3. Principle diagram of dual feedforward + dual neural network adaptive decoupling control
Fig. 4. Schematic diagram of NN1 neural network topology structure
Fig. 5. A step signal of 1 mrad is applied separately to X and Y axis—Step response curve of traditional PID control decoupling algorithm
Fig. 6. A step signal of 1 mrad is applied simultaneously to X and Y axis—Step response curve of traditional PID control decoupling algorithm
Fig. 7. A step signal of 1 mrad is applied separately to X and Y axis—Step response curve of dual feedforward + dual neural network adaptive decoupling control algorithm
Fig. 8. A step signal of 1 mrad is applied simultaneously to X and Y axis—Step response curve of dual feedforward + dual neural network adaptive decoupling control algorithm

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20