
Weigang Li, Chao Yang, Lin Jiang, Yuntao Zhao. Indoor Scene Object Detection Based on Improved YOLOv4 Algorithm[J]. Laser & Optoelectronics Progress, 2022, 59(18): 1815003
- Laser & Optoelectronics Progress
- Vol. 59, Issue 18, 1815003 (2022)
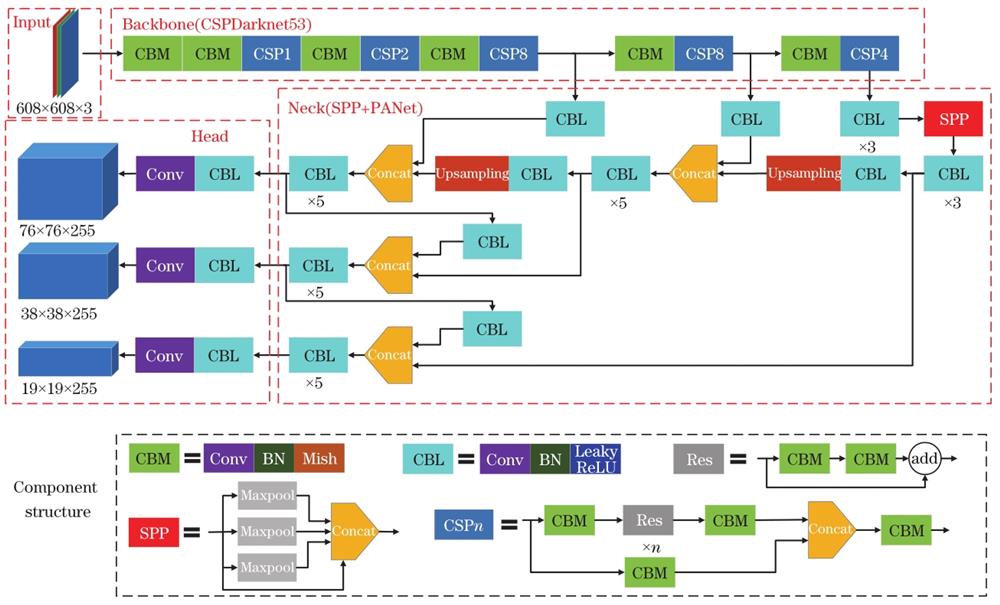
Fig. 1. Diagram of YOLOv4 network structure
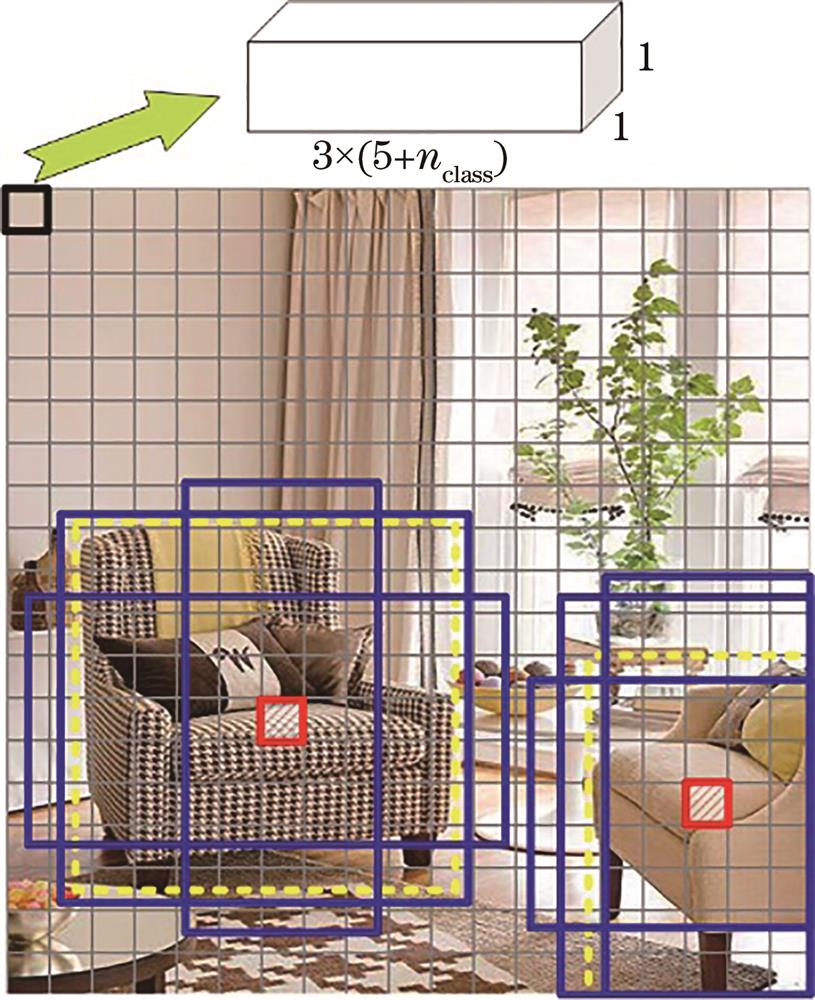
Fig. 2. Prediction box of YOLOv4 algorithm in 19×19 cells
Fig. 3. Diagram of improved YOLOv4 network structure
Fig. 4. CSPNet structured in SPP module
Fig. 5. CSPNet structured in continuous convolution module
Fig. 6. Depthwise separable convolution
Fig. 7. Scatter plot of the size distribution of sample ground truth box and prior box
Fig. 8. Accuracy comparison between K-means algorithm and K-means++ algorithm under original YOLOv4
Fig. 9. Comparison of detection results before and after algorithm improvement
Fig. 10. Comparison of detection results on each class before and after algorithm improvement
|
Table 1. Performance results of the neck network integrated into the CSPNet structure
|
Table 2. Impact of depthwise separable convolution on network performance
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Performance comparison of different improvements
|
Table 4. Performance comparison of different detection algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20