
Zhumao Lu, Na Wu, Yaning Zhao, Yang Bai, Yu Han, Haiyue Gao. Location of Unmanned Aerial Vehicle Based on Lidar Near Electric Tower[J]. Laser & Optoelectronics Progress, 2022, 59(4): 0401001
- Laser & Optoelectronics Progress
- Vol. 59, Issue 4, 0401001 (2022)

Fig. 1. Framework of proposed algorithm
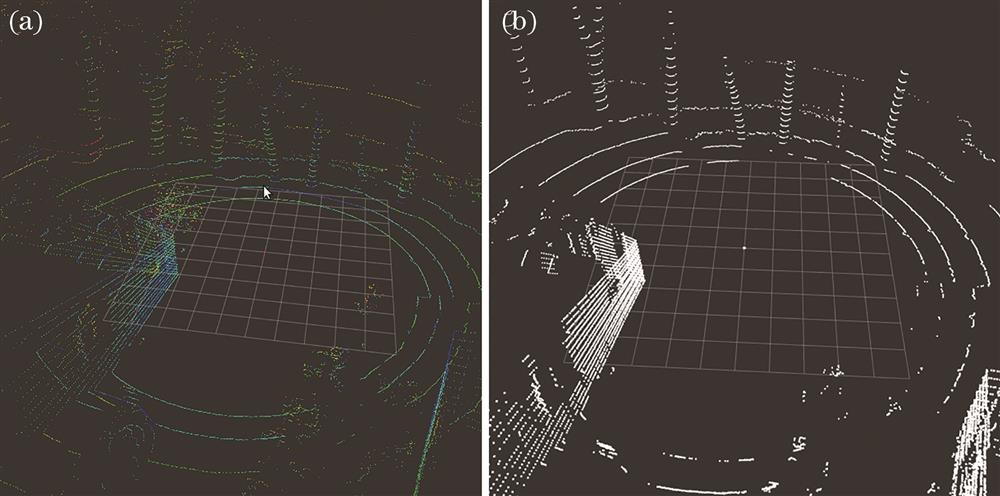
Fig. 2. Point clouds before and after filtering. (a) Before filtering; (b) after filtering
Fig. 3. Effect comparison of loop optimization. (a) Loop-free optimization; (b) loop optimization
Fig. 4. Experimental hardware diagram
Fig. 5. Experimental environment 1
Fig. 6. Effect comparison of data 1. (a) NDT algorithm; (b) NDT-ICP algorithm; (c) LOAM algorithm; (d) double filter VGICP algorithm
Fig. 7. Effect comparison of data 2. (a) NDT algorithm; (b) NDT-ICP algorithm; (c) LOAM algorithm; (d) double filter VGICP algorithm
Fig. 8. Effect comparison of data 3. (a) NDT algorithm; (b) NDT-ICP algorithm; (c) LOAM algorithm; (d) double filter VGICP algorithm
| |||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Running results of each algorithm in data 1
| |||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Running results of each algorithm in data 2
| |||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Running results of each algorithm in data 3

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20